プロフィール
山形大学 大学院・理工学研究科
教授 妻木勇一(Tsumabuki Yuichi)
経歴
2008年度 – 2019年度 : 山形大学、大学院・理工学研究科、教授
2007年度 – 2007年度 : 弘前大学、大学院・理工学研究科、准教授
2001年度 – 2006年度 : 弘前大学、理工学部、助教授
1997年度 – 2000年度 : 東北大学、大学院・工学研究科、助手
1995年度 – 1996年度 : 東北大学、工学部、助手
まだ誰も見たことのない景色を求めて
まず、こちらの画像を見て欲しい。これは、ある動物の皮膚なのだが、何の動物のものか、想像がつくだろうか。
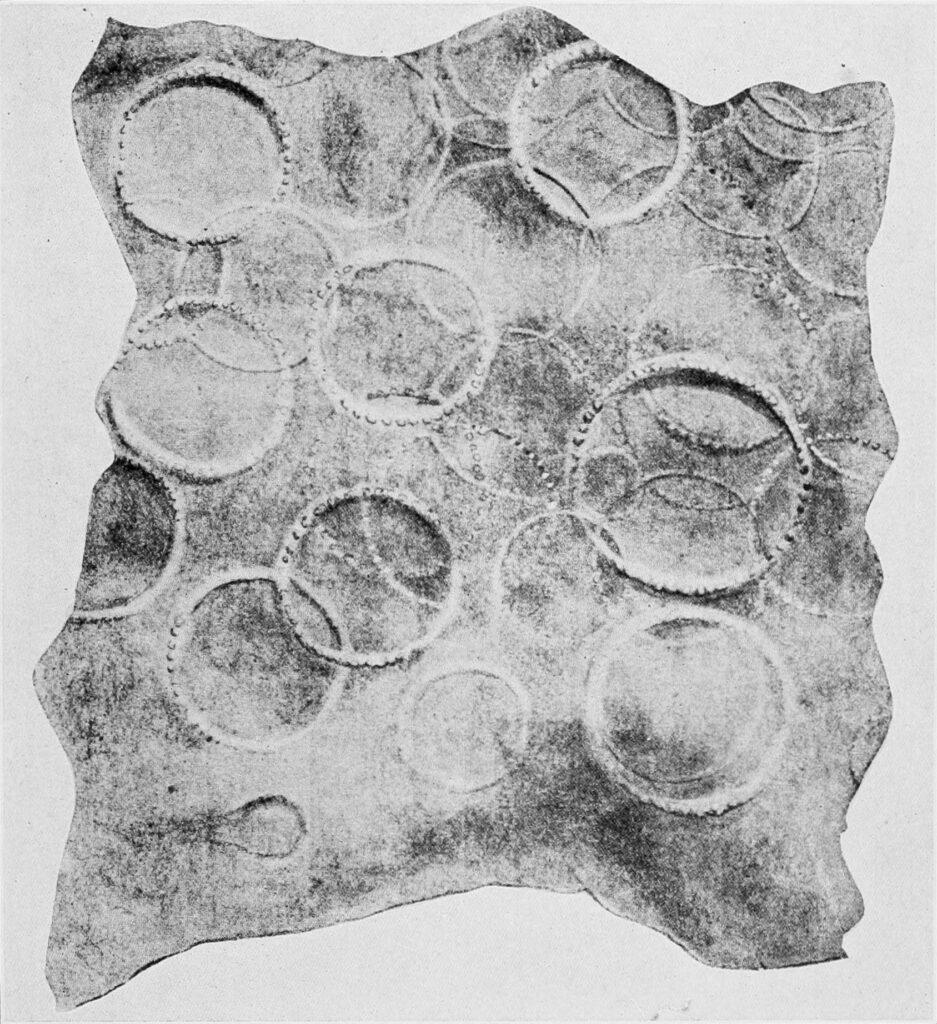
実はこれ、マッコウクジラの皮膚なのだ。
そして、この丸い模様に見える凹凸は、巨大なダイオウイカを捕食する時に、吸盤によって傷つけられた跡である。
しかし、この巨大な2体の生物が戦い、マッコウクジラがダイオウイカを捕食しているところを見た者は誰もいない。
今回紹介する研究者は、そんな誰も見たことのない世界を撮影するために、ロボット技術で立ち向かう妻木勇一氏だ。
逆境を逆手に 水流に逆らって進むパワフルローバ
野生動物の生態調査には、「バイオロギング」という手法が用いられる。バイオロギングとは、生物に小型のデータ記録装置を取り付け、行動や生態、環境情報を調査する研究手法のことだ。記録装置は水深や加速度などのデータだけでなくカメラを搭載することで動物の行動を撮影することもできる。
今回紹介するのは、マッコウクジラの生態調査に使用するクジラ用ローバと呼ばれるロボットである。
これまでのクジラの生態調査は、以下の図のような方法で行われてきた。
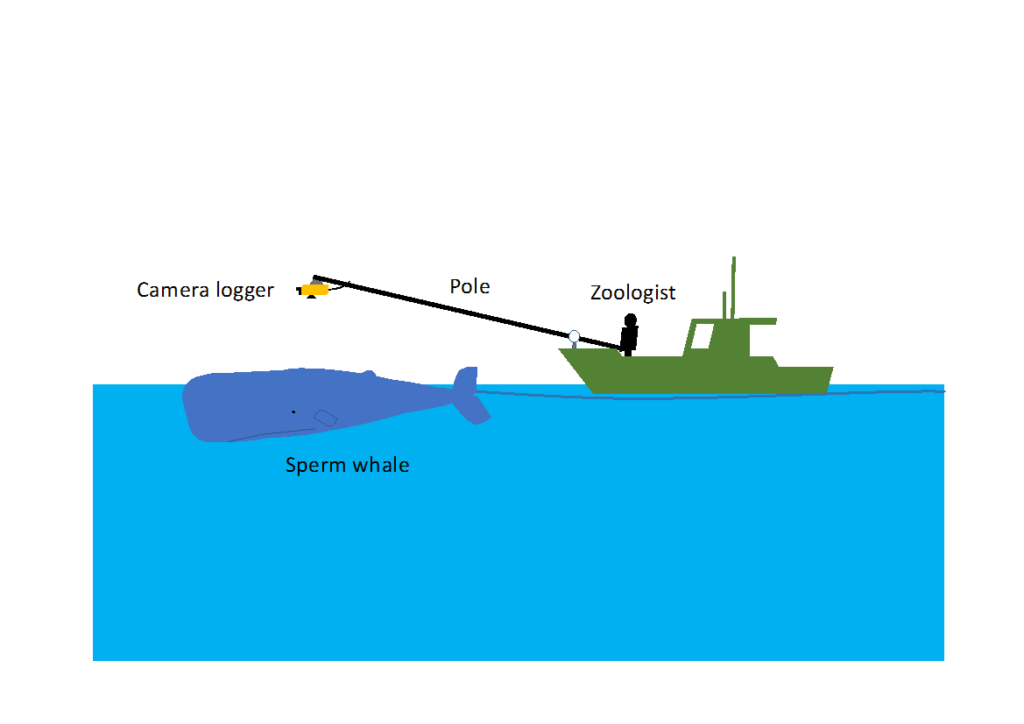 《従来のクジラの生態調査》
《従来のクジラの生態調査》
まず、長いポールの先に吸盤の付いた記録装置を取り付け、マッコウクジラの背中に叩きつけて記録装置を取り付ける。
記録装置はクジラと共に海にもぐっていき、映像をはじめ様々なデータを記録し、30分から1時間ほどで自然にはがれて海面に浮上する。
浮上した記録装置を探索・回収することで、マッコウクジラの行動を解明するのである。このバイオロギングによる手法により得られた水深、速度や加速度などのデータから、クジラの行動がある程度明らかにされてきた。
しかしこの方法には、クジラの背中にしか記録装置を取り付けられないという大きな欠点がある。
マッコウクジラが潜るのは水深1000メートルの真っ暗な深海。
当然、記録装置にはライトも搭載されているが、口元から離れた背中にあるライトの光では到底届かず、捕食シーンを撮影するという目標は達成されていない。
この記録装置を、どうにかしてクジラの口元に持っていき、マッコウクジラとダイオウイカが戦っているところが撮影したい!そんな海洋動物学者の要望を受けて、妻木氏はクジラ用ローバのロボット研究開発に取り掛かることになった。
クジラ用ローバを開発するにあたって、様々な条件があったという。
妻木氏「条件は3つあります。1つ目は、ローバがクジラに嫌がられないこと。
なぜなら、海洋動物学者の方たちが知りたいのは、クジラの普段の行動です。
クジラが取り付けられた機材を嫌がって、普段と違う行動をとってしまっては意味がありません。
2つ目は、大きさです。
ローバは水深1000メートル以上の非常に水圧の高いところまで潜ることになります。
水圧対策としては、厚い耐圧容器の中にコンピューターやモーターを入れることが一つの方法ですが、それだとローバが大型化してしまいます。
クジラに嫌がられないためにも、大きな機材を取り付けるわけにはいかないので、何か別の方法を考えなくてはいけなくなりました。
3つ目は、パワーです。
クジラが泳ぐことによって発生する水流に逆らって、口元まで進まなければいけないので、それなりにパワーも必要です。しかし、強力なモーターを取り付けると大型化してしまうので、これも悩みどころでした。」
これらの条件をクリアするために、妻木氏は試行錯誤を経て、独自の機構を開発した。
妻木氏「試行錯誤の末、水流のエネルギーを使って前に進む機構を開発しました。
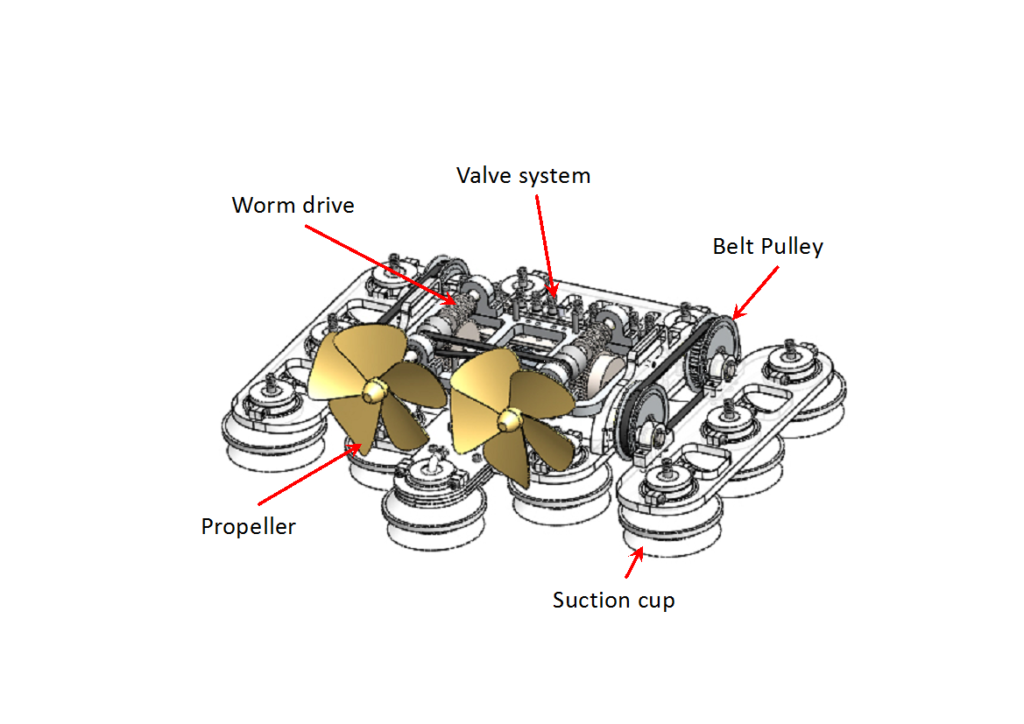 《妻木氏の開発したクジラ用ローバ》
《妻木氏の開発したクジラ用ローバ》
このローバは、水流によってプロペラが回る力を利用して、吸盤の付いた足を前に動かすことができるんです。さらに、常に内側か外側のどちらかの吸盤がくっついているので、流されてしまうこともありません。コンピューターもバッテリーも使わず、メカだけで造ることで、コンパクトさとパワーを両立しました。」
決定的瞬間をとらえるために
妻木氏にローバを今後どのように進化させていきたいか、お話を伺った。
妻木氏「従来の記録装置は、言ってしまえば運任せなんです。回収して確認するまで、望んだものが撮れているか分かりません。それでもとにかく繰り返し行うのですが、ダイオウイカを捕食するシーンはまだ誰も撮影できていないんです。
今の私たちのローバも、クジラの口元にいけるという保証はありません。センサーもついていなければ、CPUも搭載されていませんから。
 《現在のクジラ用ローバ》
《現在のクジラ用ローバ》
そういう意味では従来の方法と同じように運任せです。しかし、このローバは動いて前に進むことで、従来の記録装置と比べると決定的瞬間を撮影できる確率を上げることができるんです。
今後その確率をもっと上げていくためには、自分が今クジラのどこにいるか、目的地はどこなのかちゃんと認識して、そこにたどり着いたら止まれるようにならないといけません。
そのような能力を持たせるには必ずCPUやセンサーが必要となります。
そのために、小型のまま、耐圧をどのように実現するのかというのが今後の課題です。」
人類の謎を解き明かすためのキーテクノロジー
このクジラ用ローバには、モーターやコンピューター無しで、環境のエネルギーを利用してロボットを動かす「環境駆動」という設計思想が適用されている。
妻木氏は以前も、この環境駆動という設計思想をつかって、はやぶさ2に搭載される小惑星探査ローバの移動装置を開発している。

出典:wikipedia《筑波宇宙センターで展示されているはやぶさ2の実物大モデル》
妻木氏「山形大学を含む大学コンソーシアムで、はやぶさ2に搭載する小型探査ローバを1台開発しました。その中には各大学が開発した4種類の移動装置が組み込まれていて、我々はそのうちの一つを開発しました。
ターゲットとする小惑星は、自転周期が短く、また昼と夜の温度差が非常に大きいことが特徴でした。
その、短い周期で高温状態と低温状態が入れ替わる環境を利用する機構を考えました。
バイメタルと呼ばれる、熱膨張率が異なる2種類の金属を張り合わせた素材を使用したんです。
これは温度変化で形状が変わるので、その力を使って飛び跳ね、小惑星上を移動することができます。」
モーターやコンピューターを使わず、環境のエネルギーだけでロボットを動かす。この環境駆動の設計思想は、今回のクジラ用ローバにも引き継がれている。
妻木氏「このローバの開発が成功したら、もっと世の中に環境駆動の設計思想が広まるでしょう。
そうすれば世の中の人たちから、環境駆動の設計思想を適用してこんなことができるんじゃないかと、いろいろなアイディアが出てくる。そうやって色んなアイディアが出てくれば、今まで不可能だったことが可能になるかもしれません。」
「環境駆動」という設計思想で、過酷な環境下でも動くローバを開発する。
それはつまり、人間がこれまで容易には踏み入ることができなかった領域を、調査できるようになるということだ。
「このローバは、人類にとっての謎を解き明かすためのキーテクノロジーになるはずです。」と、妻木氏は研究の可能性について、熱く語ってくれた。
視野を広く持って、世界に挑んで欲しい
ロボット研究を志す人へ、妻木先生からメッセージをいただいた。
ぜひ世界を見てください。
日本だけじゃなく、世界を見て、そこで勝負できるようになって欲しい。
現代は技術者にとって、とても恵まれた環境になりました。
小さなマイコンやセンサーも、性能が良いものが安く手に入るようになり、機械学習を始めとするAIも、フリーのソフトウェアを使って誰でも容易に導入できるようになっています。
一方でそれは、誰でもロボットの研究開発に参入できる時代ということでもあります。
幅広い層の世界中のプレイヤーが急激に増加する中で競争しなければならない、過酷な時代とも言えるでしょう。
だからこそ、視野を広く持って、世界に挑んで欲しいと思います。