プロフィール
秋田大学 大学院理工学研究科 教授 巖見武裕(いわみたけひろ)

経歴
2016年~現在 秋田大学 大学院理工学研究科 教授
2015年 秋田大学 大学院工学資源学研究科 教授
2009年~2014年 秋田大学 工学資源学部 准教授
2004年~2008年 秋田大学 工学資源学部 講師
1993年~2002年 鶴岡工業高等専門学校 制御情報工学科 助手
これからの日本に必要なロボット
現在、日本人の平均寿命は女性が87歳、男性が81歳となり、ともに過去最高を更新している。
その一方で、介護を受けたり、寝たきりになったりせずに生活できる「健康寿命」は、女性が74歳、男性が72歳と、それぞれ平均寿命と10年ほどの開きがあることをご存知だろうか。
平均寿命と健康寿命との差は、日常生活に制限のある「健康ではない期間」、つまり要介護状態を意味する。
近年、要介護者は増加傾向にある。
昨年3月末時点の要支援・要介護の認定者は過去最多の641万人にのぼり、前年度と比較しておよそ6万人増加したという。
今後、平均寿命が延びるにつれてこの差が拡大すれば、高齢者本人の健康上の問題はもちろん、医療従事者や介護士の負担増加、医療費や介護費の増加など、多くの問題が浮上することとなるだろう。
介護を受けたり、寝たきりになったりせず、元気に生活できる「健康寿命」を延ばすための解決策が今、求められている。
今回紹介するのは、日本のなかでもとりわけ高齢化が深刻な秋田県で、人々の健康を支える医療用ロボットを開発する研究者、巖見武裕氏だ。
理学療法士に代わってリハビリを助けるロボット
巖見氏は現在、Akita Trainer(アキタトレイナー)という、4種類の医療用ロボットを開発している。

《①歩行訓練ロボット、②卓上型上肢リハビリロボット、③座位バランス装置、④FESサイクル》
そのなかでも、巖見氏が特に力を入れているのが、①歩行訓練ロボットと②卓上型上肢リハビリロボットだ。
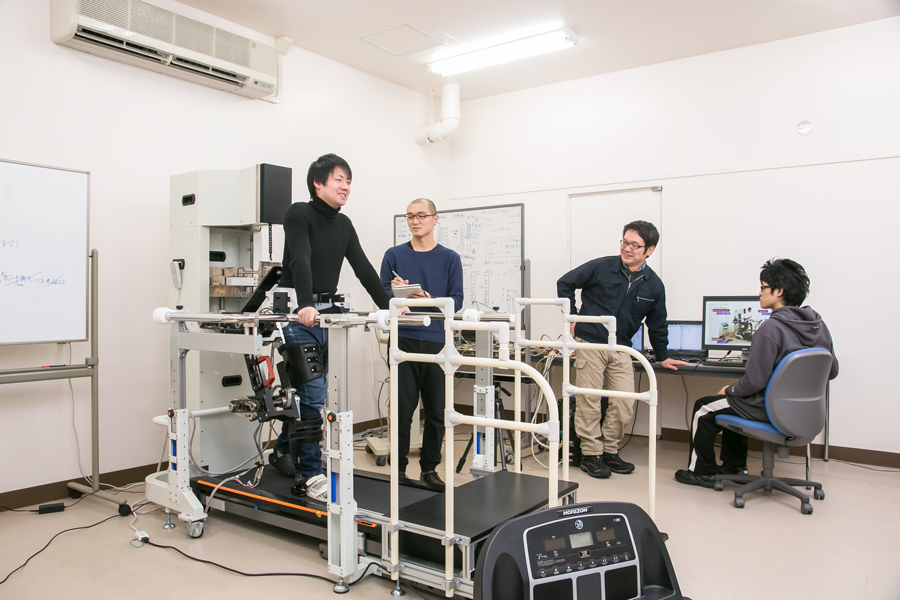
巖見氏「まずはじめに、歩行訓練ロボットは、脳卒中によって半身が麻痺してしまった患者さんを対象とした、理学療法士に代わってリハビリの介助をするロボットです。
具体的にどのようなシステムで介助するかというと、麻痺によって動かない足には、歩行をサポートする装具、健常側の脚には慣性センサ(IMU)を取り付けます。
これにより、麻痺した足をサポートする装具は、健常側の足の動きをトレースして動きます。
健常側の足を大きく動かせば、麻痺した足も大きく動き、小さく動かせば、同じように小さく動くんです。
歩き方は人それぞれ違います。患者本来の歩き方を回復させることを目標に、このような仕組みになっています。
《健常側の足の動きをトレースする様子》
さらに、麻痺した側の足には、歩行運動に合わせて筋肉を収縮させる電気刺激も与えます。
この電気刺激とロボットによるサポートを組み合わせることにより、麻痺した足をよりスムーズに動かすことができます。
また、両方の足が麻痺している、対麻痺の患者が使用する際には、装具を両足につけてリハビリを行います。
装具にはあらかじめ歩行の動きがプログラムされており、その動きを麻痺した足に繰り返させることで、歩行再建を目指します。
最終的には、1台で片麻痺と対麻痺、どちらのリハビリにも臨機応変に対応できるロボットを目指しています。
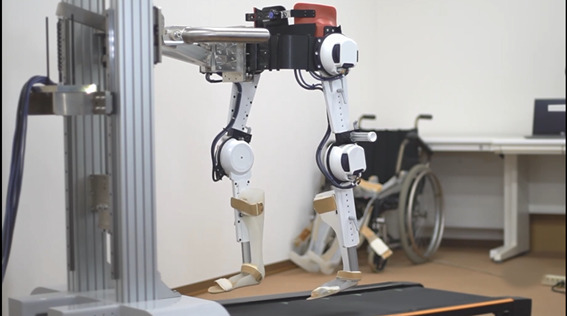
《対麻痺患者を対象とした歩行訓練ロボット》
次に、卓上型上肢リハビリロボットは、脳卒中によって麻痺した腕のリハビリを行うロボットです。
 《卓上型上肢リハビリロボット》
《卓上型上肢リハビリロボット》
このロボットは、テーブルの上を自由に動きまわれるオムニホイールと、力センサが付いていて、患者が取っ手を掴み、力を加えた方向に動きます。
力センサを介することで、動きを重くしたり軽くしたり、患者の状態に合わせて訓練の負荷を変えることができるんです。
また、この訓練にゲーム性を付与することで、患者のモチベーションを上げようという試みもしています。
患者さんに、訓練の際ARゴーグルをつけてもらって、見えている指示通りにこのロボットを動かしてもらうゲームの開発も行っているんです。

《ARゴーグルをつけた訓練の様子》
《患者の視界》
退屈せず、長時間できるようなゲームを開発し、訓練と組み合わせることで、患者さんにリハビリを楽しんでもらえたらと考えています。
理想は、使わないときは棚にしまっておいて、使うときだけテーブルにもってきて訓練できるロボット。そのため、コンパクト化にはこだわりました。」
商品化を見据えたこだわり
なぜ巖見氏はこの歩行訓練ロボットや、卓上型上肢リハビリロボットの開発に力を入れているのか。
その理由の一つが、要介護にいたる一番の原因が、脳卒中による体の麻痺だからだという。
巖見氏「脳卒中によって体が麻痺した状態から、運動機能を回復させるためには、繰り返し訓練を行うことが効果的です。練習すればするほど回復が見込めるのですが、その分、訓練の介助を行う理学療法士などセラピストの方の負担が大きくなってしまいます。
介助者の負担を減らし、かつ患者が十分にリハビリに取り組めるよう、開発を進めています。」
さらに、製品化して普及させるため、価格や大きさ、導入する際の手軽さにも気を配っていると巖見氏は語る。
巖見「実は、歩行訓練ロボットの本体は、患者さんの体を支持する部分と、足にはめる部分だけなんです。
歩行訓練に必要なトレッドミル(ルームランナー)や電気刺激の装置は、たいていのリハビリ施設にはもうありますから。すでにある設備と組み合わせる前提のもとに開発することで、無駄を省き低価格化することができます。
海外には既に、同じような歩行訓練ロボットはあります。
ですが、それはだいたい1台フルセットで数千万円はかかるうえ、高さも3メートル近くあります。
上肢リハビリロボットも、既存のものはどれも大掛かりで、なかなかこれらの装置を導入できる施設は日本にはありません。
ですが、患者さんのためにもこういったロボットはやっぱり必要です。
もっとコンパクトで小さければ、一般の病院にも入ります。もっと安ければ、個人病院でも買えます。そういうものを造りたいんです。」
できるだけコンパクトに、軽く、安く作ることによって、広く使ってもらいたい。
巖見氏の開発するロボットには、一貫してこのコンセプトが打ち出されている。

《卓上型上肢リハビリロボットと巖見先生》
ちゃんと現場で「使えるもの」を作るには
巖見氏がロボットを開発するうえで大切にしていることは、現場で本当に使えるものを造ることだという。
現場で役に立つロボット開発を目指すようになったきっかけについて、巖見氏にお聞きした。
巖見氏「小学生の頃からSF漫画やロボットアニメを見ていて、いつか自分もロボットを作ってみたいと空想するような子供でした。それが高じて、大学では二足歩行ロボットの研究をしていました。
その後、山形の鶴岡高専に勤めて、自由にロボットを作れる環境を手に入れたんですが、そこでどんな研究をしようか考えたときに、なかなかテーマが見つけられなかったんです。
その当時のロボットというのは、エンターテインメント的な側面が強く、ロボットを歩かせたり、泳がせたりすることが多くの研究者のテーマでした。
それは確かに面白いし、すごいことなんですが、それで満足していていいのか。
そこから先、どんな風に発展させていけばいいのか、目標が見つからなかったんです。
そんな時、秋田大学では工学部と医学部が協力して、医療用ロボットの研究をしていることを知ったんです。当時はロボット工学と医療を結びつけるという試みはまだ珍しくて、これは面白そうだと感じ、スタートしました。」
二足歩行ロボットの研究で培った技術を、医療の分野で役立てたい。そう考えるようになった巖見氏は秋田大学に移り、医学部と連携し、実用的なロボット開発を始めた。
実用的なロボットを開発するために、巖見氏は現場で働く人たちとの意見交換を何より大切にしているという。
巖見氏「患者さんが何を必要としているのか、自分の頭の中だけで考えていては、どうしても思いが至らない部分があります。
患者さんの治療に使えるロボットを開発するためには、患者さんに何ができて何ができないのかを理解しないといけません。現場を知ることがすごく大事なんです。
そのため、医療ロボットの開発は、私たち工学部の人間だけでなく、大学病院の医師や理学療法士さんなど、現場で働く方々を集めたワーキンググループで行っています。
月に一度全員で集まり報告会をすることで、現場の生の意見を開発に取り入れているんです。
やっぱり、研究室の中だけで物を作っていては、本当に患者さんの役に立つものはできませんからね。」
ロボットの力でできること
現場の意見を取り入れ、医療用ロボットの研究開発を進める巖見氏。
今後の目標や、新たに挑戦していきたい研究課題について、お話を伺った。
巖見氏「今後の展望としては、3つあります。
一つ目は、現在開発している医療用ロボットを製品化して広く普及させること。
秋田県から全国に発信できる商品として、秋田県の新たな産業にしたいです。
二つ目は、再生医療と結びつけることです。
実は、札幌医大と共同して、ロボットリハビリテーションと再生医療を組み合わせる取り組みを行っているんです。
例えば、事故で切れてしまった脊髄に対して、iPS細胞のような細胞製剤を注入してやることによって、神経はつながります。
ただ、神経というのは他の臓器と違って、物理的につながっただけだと作用しないんです。
ちゃんと作用させるためには、ネットワークを造らないといけない。ネットワークを造るためには、繰り返し訓練することが必要です。
再生医療で治療を行った後の訓練として、ロボットリハビリテーションは非常に効果的です。だから、再生医療とロボットリハビリテーションを組み合わせるというのが、次の目標です。
3つ目が、介護ロボットの開発です。
高齢化が進んでいくと、要介護高齢者が増えて、介護する側の人手が足りなくなることは分かりきっています。そこをサポートするロボットが必要です。
でも、介護ロボットは昔から、いろいろアイディアは出ていますが、ちゃんと使えるものが少ないんです。
工学者の視点だけでものを造っていては、現場でちゃんと使えるものはできません。現場に赴いて、実際に介護してる介護士さんたちに意見を聞かないと、本当のニーズは見えてこないんです。
そういう背景があって、厚生労働省が中心になり、介護ロボットニーズ・シーズ連携協調協議会という取り組みが行われています。
各都道府県で、介護やリハビリの専門職の方や、我々のような工学系の研究者でワーキンググループを作って、それぞれのグループが新たな介護ロボットを模索しています。
現在、私が参加している秋田県のチームでは、介護士さんのベッドメイキング作業をサポートするロボットの開発を検討しています。
これも、人型で2本腕の、完璧にベッドメイキングをするロボットを作ろうなんて考えたら、1千万円かけたって完成しません。
そうではなくて、シーツを広げるところまではロボットにやってもらって、細かい調整は人間が行う。そういった形式にすれば、ものすごく単純で、実用的なロボットが出来るんじゃないかと考えています。
今後は医療ロボットだけでなく、介護ロボットの開発にも挑戦していきたいですね。」
好きなことをあきらめずに
巖見氏から、ロボット研究者を志す人へ、メッセージをいただいた。
巖見氏「好きなことを一生懸命やってください。
私は、役に立つものを作るということをモットーに研究をしているのですが、自分のやりたいことをやるということも、すごく大事にしているんです。
私は大学を卒業後、工場のロボット化やそれに伴うロボットの開発を志して、一度半導体の会社に入りました。
ですが、そこでは自分が思うような仕事はさせてもらえなかった。
やりたいことに挑戦できない環境におかれていたときのもどかしさや焦りや苦しさを、今でも覚えています。
好きなことなら失敗しても苦にならないけど、好きじゃないことは失敗したときに後悔するんじゃないか。そう思って会社は辞め、ロボット研究の道に入りました。
結果として今は、大学時代に二足歩行ロボットの研究で培った技術が、医療や福祉の分野で役に立てられているし、他ではできない研究ができています。
今も大変なことは多いですが、自分のやりたいことが出来ているので、頑張れてしまうんですよね。
やっぱり、自分の楽しいと思えること、好きだと思えることが一番続けられるんです。
これから研究者を志す人には、ロボットが好きなんだったらあきらめず、余計なことを考えず、この道に進んで欲しいですね。」