

プロフィール
岩手大学 理工学部 機械科学コース
三好 扶准(Miyoshi Tasuku)教授

経歴
2016年~現在 岩手大学 理工学部 システム創成工学科機械科学コース 准教授
2009年~2016年 岩手大学 工学部 機械システム工学科 准教授
2008年~2009年 岩手大学 工学部 福祉システム工学科 准教授
2007年~2008年 芝浦工業大学大学院 ポスドク研究員
2005年~2007年 長寿科学振興財団 リサーチレジデント
2002年~2005年 (現)国立障害者リハビリテーションセンター研究所 流動研究員
2002年3月 芝浦工業大学大学院 工学研究科 機能制御システム専攻 単位取得退学
工場の仕事をロボットに
今回ご紹介する三好氏は現在、食品加工工場で行う作業をロボット化する研究を行っている。
三好氏が、この研究に欠かせないアイテムの一つだと言って見せてくれたものが、以下の写真だ。

香ばしい香りが漂ってきそうな、焼き目の美しいサンマの蒲焼だが、実はこれ食品サンプルなのだ。
三好氏は現在、この食品サンプルを使い、食品を缶詰へ充填する作業を行う、「AI缶詰ロボット」の開発を行っている。
そして、三好氏がロボット化しようとしている、工場での作業の様子がこちらだ。
《工場内の様子》
このレーンでは、サンマの蒲焼を缶詰に充填する作業を行っている。
焼き機からベルトコンベアーで流れてくる焼きあがった蒲焼を、10人ほどの作業者が缶詰に手際よくつめていく。
その数なんと1時間に1万缶、1日で10万缶にのぼるという。
だが、すぐ近くに焼き機があるため、作業中はかなり高温になるうえ、1日中缶詰がぶつかり合う音が鳴り響き、働く人にとってはとても苛酷な環境である。
今回は、この過酷な環境で働く人に代わって仕事をするロボットを造るため、研究開発を続ける三好氏にお話を伺った。
最新技術を盛り込んだ、AI缶詰ロボット
このAI缶詰ロボットは、一体どのようなロボットなのか、三好氏にお聞きした。
三好氏「一言で言えば、食品を缶詰に充填するロボットです。
工場のレーンで、原料となるサンマは投入後、様々な下処理を経て焼成機で焼き上げられます。
そして焼き上げる工程が済むと、缶につめる作業に入ります。現在我々がロボット化しようとしているのはこの、肉詰めコンベアと呼ばれる、缶内への食品詰め込み作業の部分です。
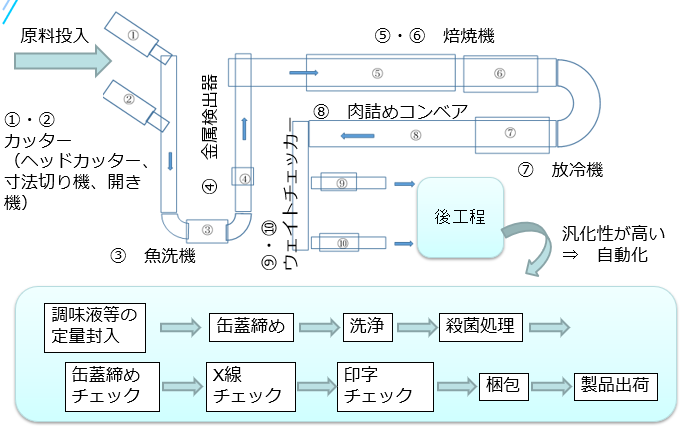
《工場の作業工程》
ここでの作業工程を精査した結果、熟練作業者の方々は、以下の5つのことを瞬時に行っていることがわかりました。
① 流れてきた蒲焼が、尾部分なのか腹部分なのかの判断
② 流れてくる蒲焼の位置の把握
③ それぞれの蒲焼の重量の判定
④ どの腹と尾を組み合わせれば規定どおりの重量になるかの判断
⑤ 柔らかい蒲焼を傷つけず掴み、缶内へ投入
AI缶詰ロボットは、以上の熟練者の作業を再現することを目標に、システムを構築しています。
まず、流れてきた蒲焼が、尾部分なのか腹部分なのかの判断をAIで行います。
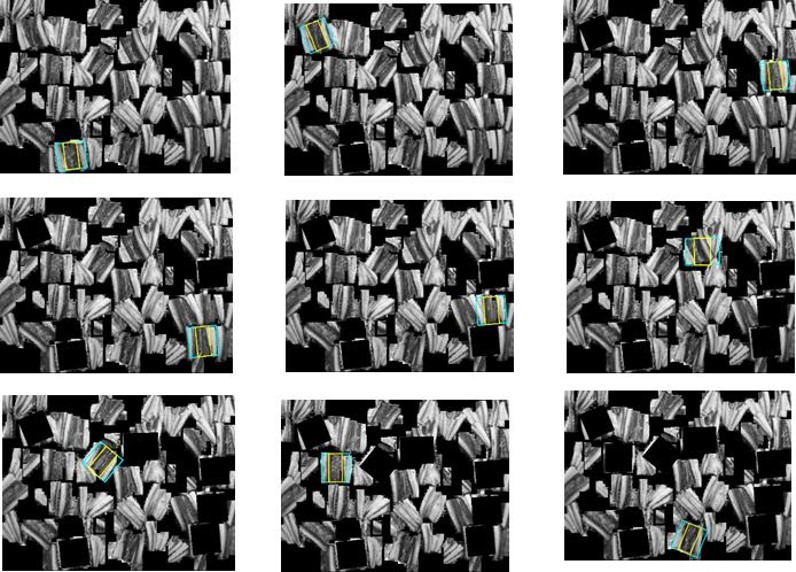
《AIが腹と尾を判定していく様子》特願:2018-59164
最初に、流れてきた蒲焼の写真を撮り、腹部分の蒲焼を探して見つけます(水色の四角で囲まれているもの)。
判定が済んだものには黒のマスクがかけられます。それを順次繰り返し、全ての腹を見つければ、残った蒲焼は全て尾のはず、という考え方です。
次に重量については、蒲焼の大きさに対応する重さの情報を何万個も収集させ、この大きさの蒲焼はこれぐらいの重さ、というパターンを学習させました。
最後に、組み合わせの判断についてです。
面積の情報と高さの情報、それを掛け合わせた体積の情報、それから部位の情報までを一個のデータにします。
その情報を元に、この組み合わせはエラー、この組み合わせは正解、というような様々なパターンを学習させて、自動的に規定どおりの重さになる腹と尾の組み合わせを算出できるようにしました。
そしてできたのが、この1号機です。
《1号機の様子》
ただ、この一号機には問題点がありました。
一番の問題点は、蒲焼が静止した状態でしか作業できないことです。
現場の方からは、流れ続けるベルトコンベアー上の蒲焼を処理できないといけない、という指摘を受けました。
もう一つの問題点は、蒲焼を持ち上げるためのアームです。
蒲焼が少ないときは良いのですが、たくさんの蒲焼が並んでいると、ターゲットにしているもの以外にもぶつかってしまうんです。
《取るのに失敗する様子》
アームがぶつかってしまうと、蒲焼の位置が、事前に撮影した位置情報とずれてしまい、ずれた蒲焼はもう取ることができません。
こういった問題点が浮上し、違う手を考えなければいけないということになりました。
そして、それらの問題点を改善したのがこの2号機です。
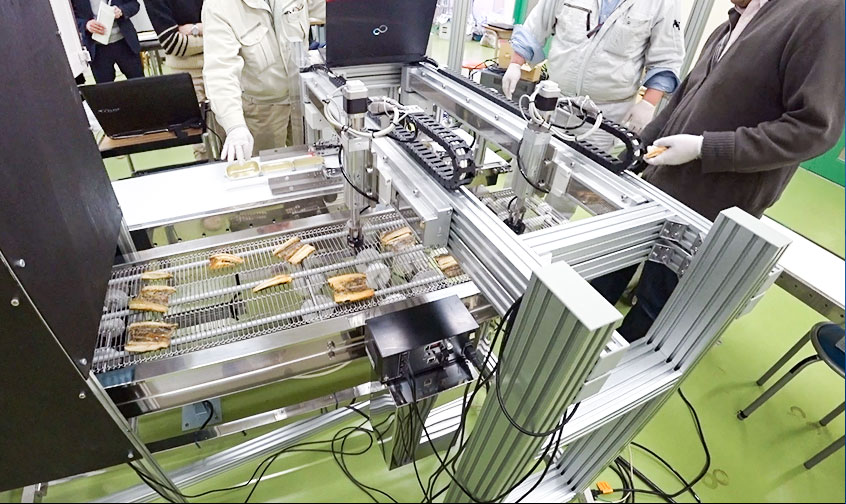 《2号機の様子》
《2号機の様子》
改善点としては二つあります。
まず一つ目は、蒲焼が動いていても体積や部位の判定ができるようになったこと。
もう一つは、蒲焼を持ち上げる方法です。
ほかの蒲焼とぶつからないよう、垂直にアプローチするために、非接触パッドという機器を導入しました。
《非接触パッドが蒲焼を吸い上げる様子》
一般的な吸着パッドは、吸い上げて対象を捕まえます。でもこのパッドは逆で、空気を噴出することで食品に接触しないで吸い上げるんです。
分かりやすくいうと、洗濯機は一定方向に水を回しますよね。そうすると下に圧がかかって、渦潮のような状態になる。
それと一緒で、空気を吐き出すことで竜巻を作り、真ん中に引き込む力がうまれることで、対象物を持ち上げます。
対象物に接触せずに吸い上げることができるので、蒲焼が崩れる心配もなく、垂直にアプローチできるため、他の蒲焼にぶつかることもありません。
これらの二点を改善したことで、工場への導入にだいぶ近づくことができました。」
※今回ご紹介した1号機・2号機は、三好氏と岩手大学の明石卓也准教授、佐々木誠准教授が共同で開発したものです。
人間にとって過酷な仕事こそ、ロボットの出番
AI缶詰ロボットの開発を始めたきっかけについて、三好氏に伺った。
三好氏「最初は、東日本大震災がきっかけでした。
当時、地震の揺れがひとしきり収まって出勤できる状態になったときに、沿岸地域の状況を目の当たりにして、自分に何か手伝えることはないか、と思ったんです。

その後、岩手の沿岸地域に貢献できるロボットを作ろうと活動する中で、今回の缶詰製造工場の社長さんと知り合いました。
最初は、長時間同じ姿勢で作業している作業者の腰が痛くならないような、サポートをするものを何か作ろう、という話だったんです。
それがきっかけで工場に伺って、現場の過酷な労働環境を目の当たりにし、これはロボットが代わりにやるべき仕事だと強く思いました。
自分はかつて、アルバイトで食品工場のレーンの仕事を経験したこともあったので、その大変さは身に染みて分かりました。
難しい課題ではありますが、大変な思いをしている人のためにも、できるだけ早く解決しなければならない課題です。
課題の早急な解決のために大切なのは、こうすればいいかな、ああすればいいかな、とアイディアをたくさん考えて、それをスピーディーに実験していくことです。
一つの考えに固執して長期間取り組んだ挙句、やっぱり上手くいきませんでした、では、いくら時間が合っても足りません。
そのため、研究開発には企業の方に積極的に入ってもらう方針を採っています。
企業の方とうまく協力することで、自分たちだけでやるよりも、ずっとスピード感を持って開発を進めることができます。」
そもそもロボットは本来、3Kと呼ばれる、「きつい、危険、汚い」過酷な仕事をどうにかするためのものだと考えているという三好氏。
人がきついと思う仕事、人がしんどいと思う仕事を代わりに行うロボットを作る。
そんな難しい課題に、どのようなモチベーションで挑んでいるのだろうか。
三好氏「難しい課題でも、「ノーと言わずにやる」ことを大切に、今日まで続けてきました。
ノーと言ってしまうのは簡単ですが、面白くないですよね。簡単にあきらめず、どうやったらその問題をクリアできるのか試行錯誤するほうが、ずっと楽しいです。
そして、大変な仕事ほど、にこやかに取り組むことにしています。
大変な仕事を苦しそうにやると、まわりに大変さが伝染してしまいます。
同じ仕事量ならにこやかに取り組んだほうが、仕事も楽しくなるし、周りにも良い雰囲気を与えられますよね。
やっぱりどんな仕事であれ、自分もみんなもにこやかに、楽しくできるのが一番だと思います。」
たくさんの人と協力し、たくさんの課題を解決してほしい
ロボット研究者、開発者を目指す人へ、三好氏からメッセージをいただいた。
工学の原点に戻って、「人を助ける」ということを目的としたロボットの開発を目指して欲しいです。
もちろんロボットそのものを研究しないと技術が上がらないのは事実です。
それを否定はしません。ただ、そればかりじゃなく、ロボットが本来持っている人を助ける役割にも、しっかり目を向けて欲しい。
もうひとつは、自分の専門以外の分野にも興味を向けること。
一つの分野の知識だけで、解決できる課題はすごく少なくなってきています。
アンテナを高く立て、いろいろな知識を積極的に吸収し、自分の得意・不得意を理解する。
不得意なことは、友達を作って一緒にやればいいんです。
そういうやり方をしないと、仕事が進まない時代になっています。
そのためにも、コミュニケーション力が必要です。
自分に欠けているスキルをもっているなら、日本人だけじゃなく、中国人だろうと韓国人だろうとアメリカ人だろうと、関係なく協力しましょう。
そうやってたくさんの人と協力し、たくさんの課題を解決していってほしいですね。
