

プロフィール
帝京大学 理工学部 機械・精密システム工学科
講師 池俣 吉人(Ikemata Yoshito)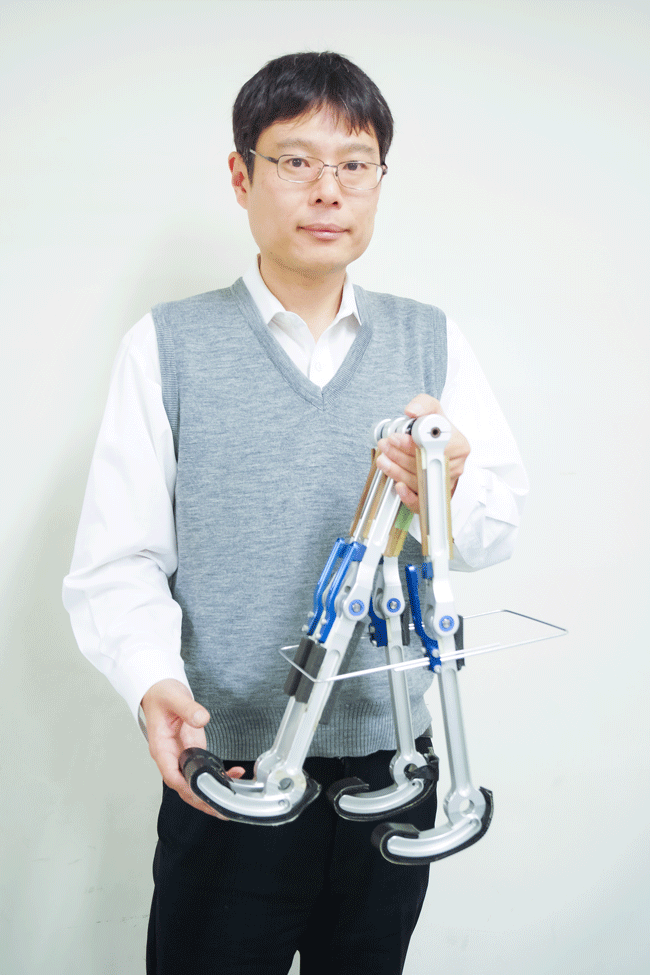
経歴
2012年1月 – 現在
帝京大学 理工学部 機械・精密システム工学科 講師
2011年6月 – 2011年12月
筑波大学大学院 システム情報工学研究科 助教
2008年5月 – 2011年5月
名古屋工業大学 トヨタロボティクス・ハプティクス研究所 特任助教
2008年4月 – 2008年4月
名古屋工業大学 協力研究員
2006年4月 – 2008年3月
名古屋工業大学 産学官連携センター 非常勤講師
電気を使わず歩き続けるロボット
あなたは、歩行するロボットといわれて、どんなロボットを連想するだろうか。
センサーでバランスや姿勢を制御し、モーターの動力で動く。真っ先に頭に浮かぶのは、そんなロボットではないだろうか。
今回紹介する池俣氏が研究しているのは、受動歩行ロボットと呼ばれる、電力なしで歩き続けるロボットだ。
池俣氏「受動歩行ロボットには、モーターやコンピューター、センサー等の機器が一切付いていません。
それでいて、緩やかな傾斜の上に置いて足を振ると、重力を利用しトコトコと歩き続けることができるんです。
https://www.youtube.com/watch?time_continue=9&v=30hp4xTYaUc
《トレッドミル上を歩く受動歩行ロボット》
プログラムによる制御を一切行っていないにもかかわらず、その歩く姿は電力を使って歩くロボットに比べて人間の歩行に近く、エネルギー効率もはるかに高いんです。
この受動歩行ロボットを研究することは、安定して歩行する原理を解明することにつながります。
それを応用し、将来的には、電力を使用しない安全で安価な歩行支援機の開発に役立てたいと考えています。」
研究の方向性を大きく変えた言葉
今でこそ、人間のようにスムーズに歩いてみせる受動歩行ロボットだが、この状態にたどり着くまでには長い道のりがあったという。
池俣氏「研究の始まりは大学院時代まで遡ります。
研究室にいた当時、カナダのタッド・マクギア博士が製作した受動歩行ロボットを見て、その人間に近いスムーズな動きに惹かれた私は、研究室の学生と協力してロボットを製作して実験を重ねました。
ですが、私たちの造ったロボットは少し進んでは転びを繰り返し、ほとんど歩くことができなかったんです。
https://www.youtube.com/watch?v=kBDbR6VXlTw
《受動歩行ロボットが転ぶ様子》
このロボットを歩かせるためには、マクギア博士のロボットを真似るだけではなく、受動歩行ロボットがなぜ歩くことができるのか、その原理を解明しなければいけませんでした。
けれども、なかなか思うように研究は進まず、悶々と悩む日々を送っていた時、恩師の佐野明人先生から一冊の本をいただいたんです。
その本の帯には「複雑に考えるな、単純に考えろ」という言葉が記されていました。
その当時の私は、受動歩行の原理を解明するために、かなり複雑な数理モデルを使って研究を行っていました。
ただその方法では、複雑さゆえに途中で行き詰ってしまい、思うように研究は進まなかったのです。
しかし基本的に、力学的原理というものはその対象が複雑でも単純でも、共通しているはずです。
そこで、今までやっていた研究は一旦全て捨て、もっと単純な数理モデルを使って研究を再スタートすることにしました。
そして、研究の対象を変更し取り組んだことで、安定して歩くために一番必要なのは歩幅を一定に保つこと、という非常にシンプルな答えにたどり着いたのです。
その後、受動歩行ロボットの脚の前後にコの字型のフレームをつけ足の動きを拘束することで、歩幅を一定に保つことが出来るようになりました。
そこから、当時全く歩けなかった受動歩行ロボットが、着実に歩数を伸ばしていったんです。
研究を始めたころは、2、3歩歩くのがやっとだったのが、最終的には約10万歩を歩き、当時「世界で最も長く歩いた受動歩行ロボット」としてギネス記録にも認定されました。」
https://www.youtube.com/watch?v=VUBfCBuissU
《以前に比べスムーズに動くようになった受動歩行ロボット》
複雑に考えず、単純に考える。
原理を解明し、研究を前に進めるためには、この思考法が大事になってくると語る池俣氏。
苦労の末歩行の原理を解明し、10万歩歩く受動歩行ロボットを造り上げた研究者の言葉には、確かな重みを感じた。
原理を探求することの意味
研究のモットーとして、複雑に考えず、できるだけ単純に考えることを心がけているという池俣氏。
受動歩行ロボットの研究・開発では、それに加えて、「原理の探求」を念頭に置いているという。
池俣氏「ロボットを開発していく上では、まず原理を探求し、それを応用したものを作るように心がけています。
なぜ、始めに原理の解明にこだわるかというと、それ無しには研究を発展させることは出来ないと考えているからです。
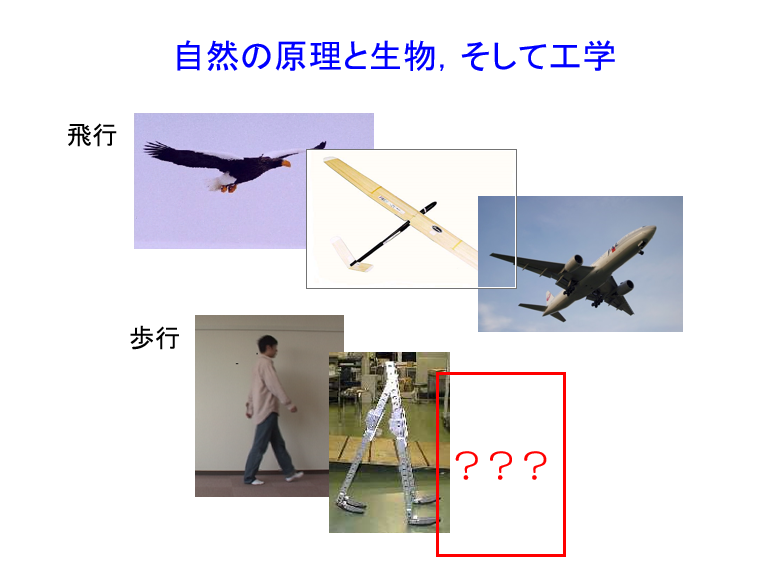
例えば、鳥の飛行を極限までシンプルに再現したものが、グライダーになります。
このグライダーの飛行原理を利用することで、飛行機が出来上がります。
受動歩行ロボットもそれと同じで、人間の歩行の原理を追求した、とてもシンプルなロボットです。
ですが、このロボットの歩行原理を明らかにすることで、新たな技術が生み出せるのではないかと考えています。
それは人間の歩行支援技術かもしれないし、よりエネルギー効率の良い歩行ロボットかもしれない。
原理を追求したシンプルなロボットだからこそ、様々な技術に応用できる可能性があります。
そういった新しい技術を生み出すためにも、まずは人間は何で歩けるのか、という根本的な原理から考える必要があるのです。」
目標に向かって一歩ずつ
ロボットの研究開発を志す人に向けて、池俣氏からメッセージをいただいた。
「まずは、基礎力をしっかりつけましょう。
機械の設計でも、電気回路の設計でも、プログラミングでも、幅広く何事にも興味を持って取り組んでみてください。
そうすると、自分の得意不得意が分かってくると思います。
その中で、自分の得意なもの、好きなものを見つけてください。
そうしたら、次は目標をはっきりさせましょう。
課題を解決するためのアプローチ、方法論はたくさんあります。
ですが、目標がはっきりしていないと、それらも空回りしてしまいます。
一番始めに、自分が何をやりたいのか、自分のゴールをしっかり決めることが重要です。
目標が決まったら、最後に重要なのは継続力と集中力です。
途中で飽きて放り出してしまっては、そこで終わりになってしまいます。
千里の道も一歩からです。研究のゴールがどれだけ遠く思えたとしても、一歩踏み出せば一歩分前に進みます。
具体的な目標の形をしっかりとイメージして、それに向けて一つ一つ課題をクリアしていきましょう。」
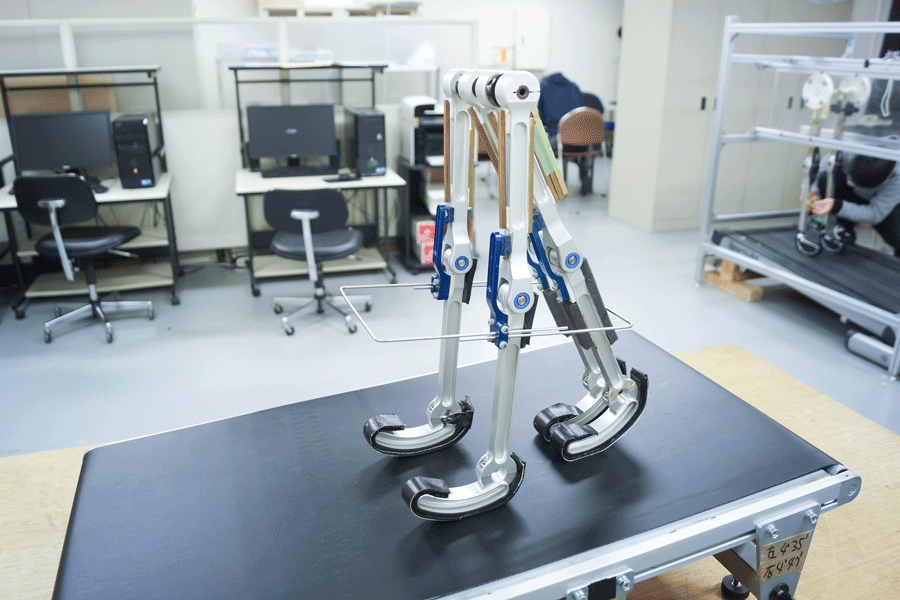
《現在の受動歩行ロボット》
池俣研究室URL:https://www.teikyo-u.ac.jp/faculties/undergraduate/science_tech/machine_sys_ikemata.html
Passive Walking Lab(Youtubeチャンネル):https://www.youtube.com/channel/UCw20Opw_tJTfUvJczQNE92A/featured