

プロフィール
東北大学 大学院情報科学研究科 システム情報科学専攻 知能ロボティクス学講座 知能制御システム学分野 教授 橋本 浩一
経歴
2015年より 東北大学大学院情報科学研究科副研究科長
2014年 計測自動制御学会フェロー
2012年 計測自動制御学会理事、東北大学総長特任補佐
2011年 東北大学総長特任補佐
2004年 東北大学大学院情報科学研究科
システム情報科学専攻教授
2002年 科学技術振興事業団戦略的創造研究推進事業
さきがけ・SORST研究員
2000年 東京大学大学院工学系研究科計数工学専攻助教授
1997年 岡山大学工学部システム工学科助教授
1994年 岡山大学工学部機械工学科講師
1990年 大阪大学工学部電子制御機械工学科助手
「なぜたどりつけるの?」を科学する“生物移動情報学”
今回ご紹介するロボット研究者の橋本氏は、2015年から生物移動情報学という新しい学問の分野を確立するプロジェクトを立ち上げ、現在約100名の研究開発メンバーを率いる科研費新学術領域プロジェクトの領域代表である。
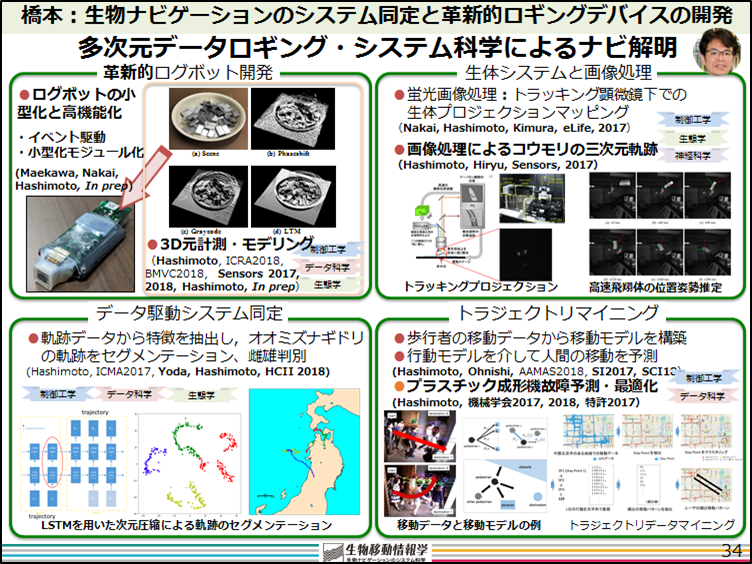
生物移動情報学とは、生物のナビゲーションの経路、環境情報、生体内部情報を観察し、生物ナビゲーションの演算モデルをつくり実社会に応用することで、例えば車やロボットの効率的な走行制御などに活かし、社会問題の解決を目指す学問である。
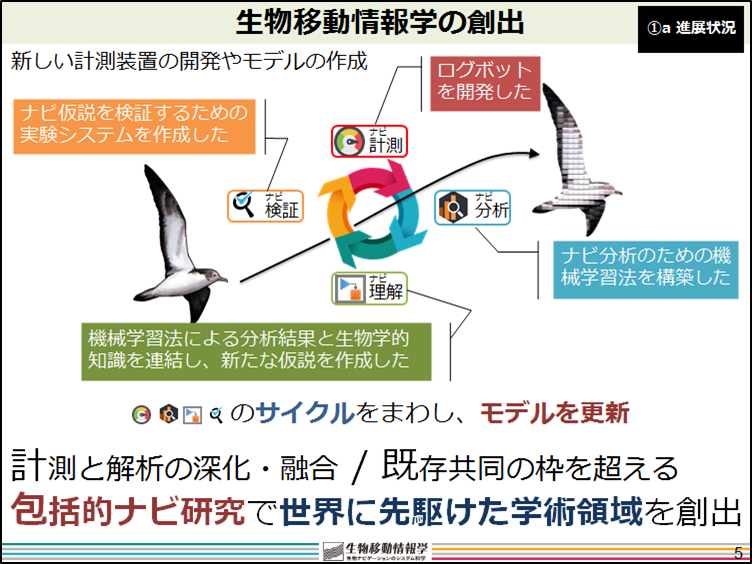
現在、橋本氏は動物のナビゲーションの仮説を検証するための機器“ログボット”の研究開発を進めている。
ログボットとは、地球上の生物の行動の追跡や画像撮影ができ、更に神経活動なども測ることが出来る装着型の記録計機器である。
ログボットについては、生物に測器を取り付けて行動や生態の調査をする日本バイオロギング研究会の会長も「これは、バイオロギングの再発見だ」と高い評価をしている。
地球レベルの生物移動情報の研究原点は顕微鏡の世界からはじまった
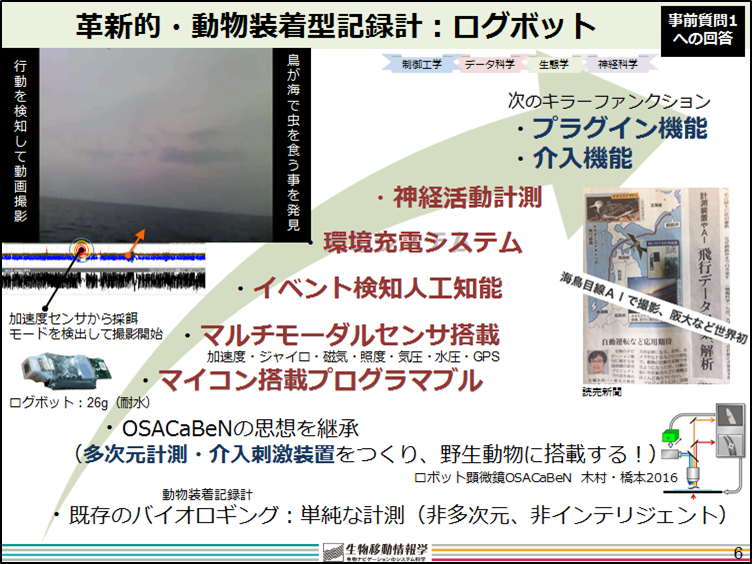
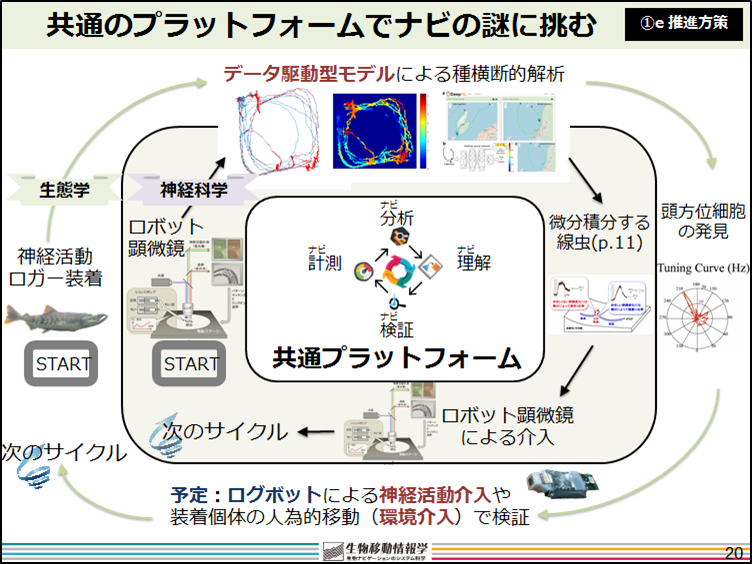
ログボットを開発するきっかけとなったのが、今回ご紹介する“ロボット顕微鏡”だ。
ロボット顕微鏡とは、素早く動く線虫などの生物の神経細胞を、自律して追跡し撮影ができる顕微鏡型のロボットである。
また、蛍光観察と併用でき、微生物の神経活動まで観察することができる画期的なロボットである。
橋本氏「2000年頃に所属していた東京大学の石川先生の研究室で、当時1秒間に1,000枚撮影(1,000fps)できるカメラが完成しました。
石川先生はカメラを使って、ボールを投げたり掴んだりするロボットや、じゃんけんで100%勝つロボットなどを造り、私も共同研究者としてバッティングロボットなどを造りました。
この頃、私はカメラで撮影する世界のサイズを変え、ミクロの世界で活用することを考えていました。
実は小さな生物は、すごく動きが早い。だから小さな生物を撮影するときに、1,000fpsカメラの威力が役に立つのではないかというアイデアです。そして、顕微鏡の中で素早く動くゾウリムシなどの微生物を、自律して追跡し撮影できる“ロボット顕微鏡”を開発しました。
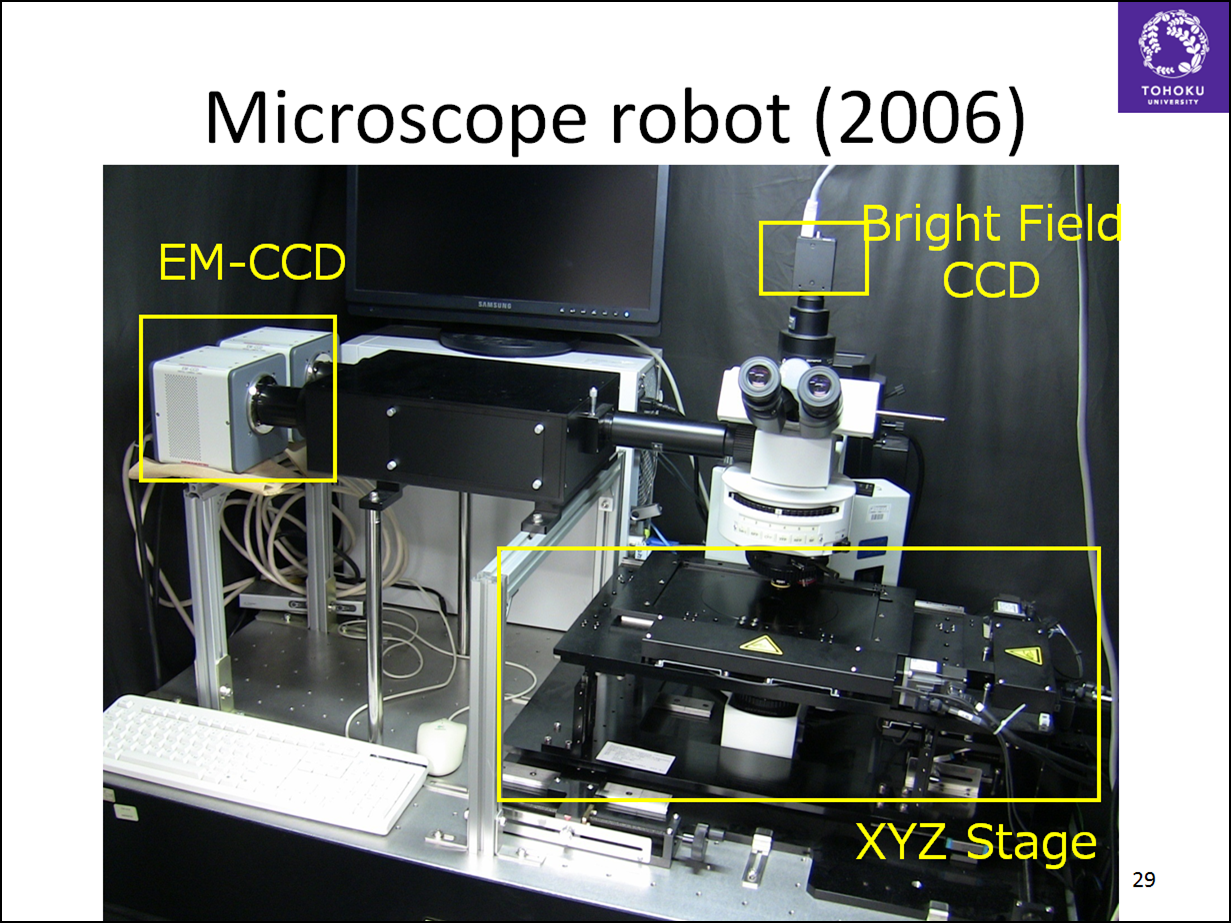
ロボット顕微鏡の特徴は、赤外線カメラで撮影した映像から微生物の行動を追跡し、更に微生物の神経活動が観察できる蛍光タンパク質の光を別の高感度カメラで撮影します。
また、撮影した2つの光を分けるために半透明なミラーをつけ、波長の長さにより反射するミラーを設置し、2つの光を同時に撮影できる仕組みです。
このロボットが出来たことにより、微生物の行動と神経活動の映像を合わせることで、ある行動を起こしている時に頭の中では何が起こっているのかを調べることが出来るようになりました。
この映像はロボット顕微鏡が動いている線虫の頭部をトラッキングして、一分間位追いかけています。
変形するパターンの動きを追いかけるというのは、実は画像処理技術では難しいのですが、我々が作った画像処理のアルゴリズムで完璧に線虫をトラッキングすることに成功しました。」
生物を制御するオプトジェネティクス技術
ロボット顕微鏡の実験で使った線虫は、大きさは1mm位で、神経細胞はわずか302 個しかない。
そのため遺伝子組み換えにより蛍光タンパク質を特定の細胞に埋め込むことができ、一個の神経細胞だけ光るように遺伝子を細工することもできるのだ。
また、オプトジェネティクスは、光で神経細胞活動を制御出来るため、蛍光観察と組み合わせて神経活動をフィードバックして光刺激すれば、生物のロボット化も可能な技術である。
橋本氏はオプトジェネティクス技術を使用した、生物の制御の研究にも取り組んでいる。
橋本氏「これは共同研究者の東大の飯野研究室で開発された、“ダンスする虫”です。画像のフィードバックで光照射のタイミングを制御しています。
この線虫の左右の塩センサーニューロンにオプトジェネティックタンパク質を導入し、ある条件下で飼育すると、青い光を照射するたびに頭を振った方向に曲がる線虫を造ることができます。
仕組みをひと言で説明すると、線虫は塩が好物のため、塩を認識する神経細胞に光を照射することで、その方向に塩があると錯覚をおこし、そちらに曲がります。
この動画は2012年に共同研究者の遺伝研・武藤先生と埼玉大・中井先生のグループが撮影したゼブラフィッシュの蛍光観察画像で、脳の活動を可視化した分かりやすい実験映像です。
ゼブラフィッシュの脳が活性化すると蛍光を発するように細工し、エサとなるゾウリムシが右にいると左の脳がピカッと光って、左にゾウリムシがいると右の脳が光り、視神経が脳の中で交差しているというのが綺麗に分かります。
このような研究をする中で、今度は顕微鏡や体内の世界を飛び出して、地球規模での生物の行動の意図を推定したいと思い、生物移動情報学のプロジェクトを立ち上げ、ログボットの開発も始まりました。」
ログボットで動物の行動を測定し、データから意志を推定
橋本氏は生物移動情報学プロジェクトを推進運営しながら、動物に装着する記録装置“ログボット”の研究開発を行っている。
現在、開発中のログボットの目標について橋本氏が話してくれた。
橋本氏「現在、ログボットで渡り鳥などの行動を計測していますが、そのデータの解析が進むと様々な行動予測に使えます。
このプロジェクトが終了した数年後5年後くらいには、畑を荒らすイノシシや、町に出没するクマなどの鳥獣被害対策などにも拡張できると期待しています。
現在の目標は、動物行動から導き出されたアルゴリズムを使って、交通やロジスティックの最適化を実現したいと考えています。
また、災害や交通事故が起こった時に、自動車についているセンサーやドライブレコーダーだけじゃなく、Twitterとか他の情報源をうまくマージして最適解を提供してきたいです。
それにより、交通渋滞を少なくし、人間が移動しやすい世界が実現できると考えています。
開発中のプラットフォームやソフトウェアに、研究成果のアルゴリズムを組み込み、交通量や地図データなどを追加して、自動車のナビゲーションを最適化する研究も進めています。
私たちが考える自動車のナビゲーションの最適化とは、一般的な短時間で目的地に行くだけではなく、省エネで行く、ドライバーが快適に行くなど、ユーザのニーズに合わせて最適なナビゲーションができることです。
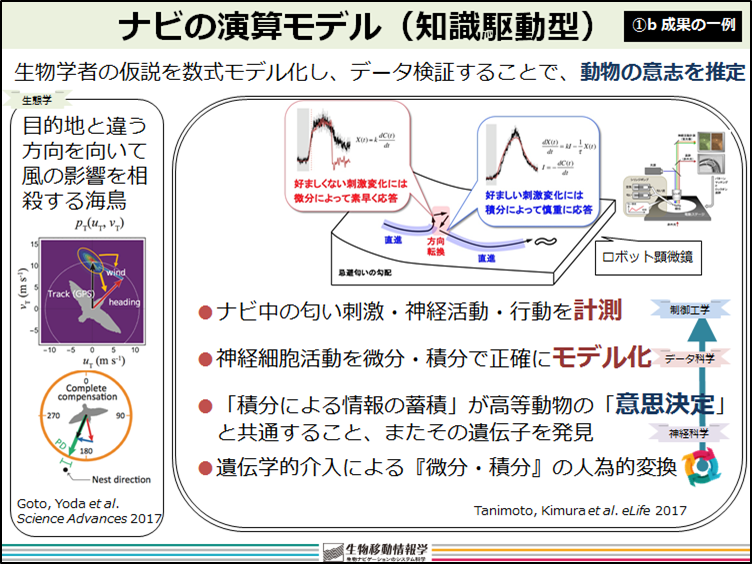
このアルゴリズムのベースとなるのは、渡り鳥のアルゴリズムが使える可能性があります。
例えばコスト関数を推定し、渡り鳥が何を考えてこのルートを選んでいるのかを検討すると、
早く着きたかったり、楽がしたかったり、混んでいるところは嫌だとか、何か理由があるはずです。
その為、渡り鳥が何を最適化してそのルートを選んでいるのか、コスト関数をどう選んでいるか推定できれば、
自動車のナビゲーションに対しても同じこと当てはまると考えています。
要するに、人間が自動車を運転する際に、省エネしたいのか、楽に行きたいのか、途中どこかに立ち寄りたいのか、そのコスト関数が推定できるような仕組みができれば、もっとパーソナライズされたナビができるということです。
そのためには人間が自動車を運転する際、何を一番減らしたいか、最適化したいかを推定するアルゴリズムが必要となります。
しかし、アルゴリズムを造るためにはデータが必要となりますが、プライバシーの問題があるため人間のデータを集めることは困難です。
そこで、私達の出番となります。
動物であればヒトに比べてはるかに多様なデータが収集できるため、現在動物の行動データから意志を推定し応用するという研究に取り組んでいます。
動物と人工物の流れを最適化する
生物移動情報学の未来ビジョンについて、橋本氏は話してくれた。
橋本氏「これまでナビゲーションについてお話してきましたが、私が考えるナビゲーションの定義は以下の3つです。
1つ目が、目的地を設定すること
2つ目が、ルートを選ぶこと
3つ目が、体を制御してルート通りに動くこと
3つ目の“体”には生物や機械、また移動能力の種類により、歩いたり、泳いだり、飛んだりと運動能力の制約となるモーションキャパシティがあります。
例えば、飛べる動物と泳げる動物ではモーションキャパシティの違いにより、目的地へ行くルートも変わってきます。
鳥でいえば、長く飛べる渡り鳥は遠くに目的地を設定できるが、飛べない鳥は近場にしか設定できない。
そう考えると、ナビゲーションの3つの定義が複雑に絡まって、実際の行動を導くことができます。

現在の自動車のナビゲーションは、目的地を人間が設定し、ルートは地図からコンピュータが計算し、そのルートに従って動くかは人任せです。
私たちが考えているパーソナライズされた自動車のナビゲーションシステムでは、将来的にはユーザの今日の気分に関わる情報を収集して、オススメの目的地やルートが出てくるようになります。
仕組みとしては、ナビの中に数種類の運転ヒストリーが準備されており、ユーザが運転していた時のデータなどからユーザの気分を推定して、提案や案内をします。
また、もう少し先の未来の世界の話をすると、例えばロジスティック分野でいうと、現在90%の荷物がトラックで運ばれています。
このトラックの荷物移動の効率化と省エネ化の課題を解決することができれば、大きな国民の利益につながります。
また、工場でのモノの製造の流れも、ナビゲーションで最適化することが可能になります。
最終的な目標は“人も含む動物と人工物の流れを最適化すること”です。
実現できれば、私たちの生活は快適になり、現在ある少子高齢化やエネルギーなど持続可能な社会の問題解決に繋がると考えています。」
制御工学からロボットの世界へ
現在、分野超えて活躍している橋本氏。コンピュータに憧れた少年時代から現在のロボット研究者になるまでのヒストリーを聞くことが出来た。
橋本氏「当時コンピュータは珍しくて、私が始めてプログラミングしたのは、パンチカードのプログラムでした。
今だとエディターの上で一行でかけるものが、当時はパンチカード一枚でした。
だから一万行のプログラムを書こうとすると、パンチカードを1万枚も並べなければいけない。
そして、完成した1万枚をプログラム室に運ばなきゃいけないのですが、一行でも間違ったらそのプログラム動かないんです。
その為にも、カードの配列を間違わないようにカードの横にマジックで線を引いて印をつけていました。
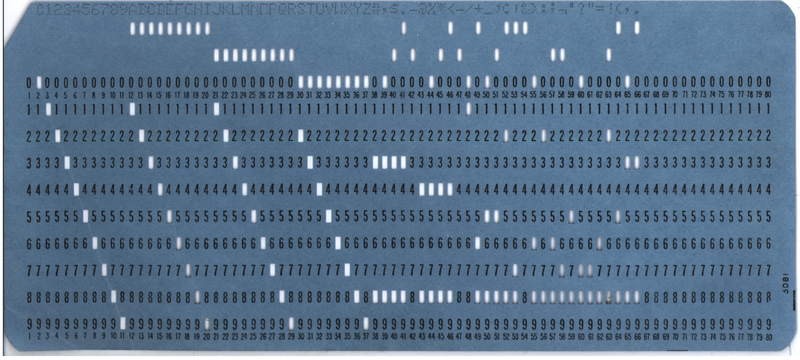
出典:https://commons.wikimedia.org/wiki/File:Blue-punch-card-front-horiz.png
高校時代、大阪大学に情報工学科ができ、私はコンピュータをやりたかったので情報工学科に行きたかったのですが、ちょっと学力が足りず制御工学科に行くことになりました。
しかし、制御工学へ進んだことでロボットの道に進むことができました。
ちなみに制御工学の歴史は古く、ジェームズ・ワットによる蒸気機関の改良に端を発します。
当時、蒸気機関の蒸気の力を効率良く使えていなかったため、改良するために制御に関する考え方が生まれ、爆発的に広がっていきました。
次のブレークスルーは、ノーバート・ウィーナーが第二次世界大戦の時に、飛行物を落とす迎撃ミサイルの制御理論を生み出しました。
飛行物の経路を予測してミサイルを当てるため、飛行物の経路予測などを導き出す理論です。
しかし、ノーバート・ウィーナーの本はとっても難解で、理解できる人が少なかった。
そして、ルドルフ・エミル・カルマンが現代制御理論を確立する。
現代制御理論になると線形代数だけで全てでき、様々なセンサーでマルチバリアブルなセンシングをして、マトリックスをかけることによって将来を予測できる。
マトリックスとベクトルの掛け算で将来が予測できるようになったため、将来予測が簡単になりました。
このように制御工学は、ワットの勘に頼ったチューニングの世界から、ウィーナーの理解できない予測モデルへ、そしてカルマンの現代制御理論へと進歩してきたのです。
しかし、私の大学時代には、カルマンの現代制御理論を使うために必要なセンサーが付いた工場はほとんどありませんでした。
そんな中、現代制御理論を適応するために投資をして、鉄鋼を生産する先端のプラントがあり、先生の友人に紹介していただき、その現場で学ぶことができました。
当時、私は製鉄所おける圧延ラインの最適制御などを学んでいましたので、本当に喜びました。
製鉄所では圧延ラインで鉄板を薄くしますが、張力の制御に失敗すると、ローラーの間に鉄板が挟まり鉄板が切れてしまいます。
そうなると、なんと損失額は10億円。
失敗がゆるされない制御の仕事でしたが、製鉄所の人と共に働いて、その圧延プロセスの設計に携われたことが、大学時代の忘れられない大切な思い出です。
その後大学院に進み、1987年ころからデジタルカメラの画像処理が注目を浴び始めました。
私もすぐに飛びつき、ロボットを画像処理で動かしたいと思い、ロボット研究に進んだのが1990年くらいのことです。
東京大学の石川 正俊先生の元で1ミリセカンド(1/1000秒)のビジョンが使えるようなり、沢山のシステムを造り、顕微鏡ロボットに辿り着きました。
その後、現在の東北大学に移り、顕微鏡ロボットに絞って研究をしていくうちに、生物学者やAIの専門家など他分野の知り合いが増え、現在の生体移動情報学プロジェクトの礎が出来ました。」
リーダーとしての想い
現在、生物移動情報学という融合研究のプロジェクトを推進する橋本氏。
プロジェクトでは様々な分野の人とディスカッションをし、どういう戦略で研究を進めていくかを話すのが本当に楽しいそうだ。そのプロジェクトについて橋本氏から話を聞いた。
橋本氏「これまではロボット研究だけでも楽しかったのですが、約100名のプロジェクトメンバーのチームでの研究は別格の楽しさがあります。
このプロジェクトの目的は、生物移動情報学を新学術領域に育てることです。
とにかく、2015年にスターとしてから、これまで「やるぞ~」といったことは実現しつつあるので、最後までやり遂げたいと思います。
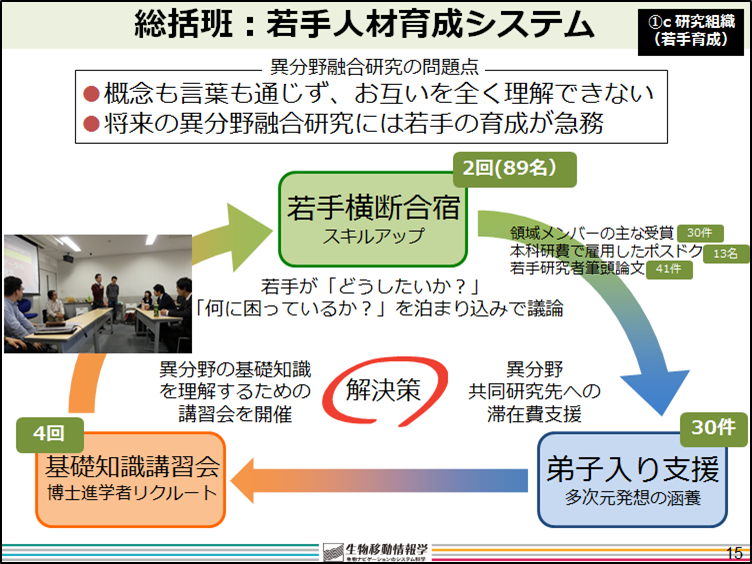
そして、若手の育成にも力を入れています。
何もしなければ縦割り組織となり硬直し、若手が成長できにくくなってしまうため、成果自慢大会や、研究分野を超えた弟子入り制度や、泊り込みの合宿を実施し、若手の成長を促す活動をしています。
最終的には、参画してくれているメンバーが、私と同じようにこのプロジェクトでの研究を面白いと思ってくれてたら、大成功だと考えています。」
橋本氏よりメッセージ
つまらないと思うアイデアでも、忘れないうちに多くのエネルギーを注いで製作に取り組めば、他の研究者よりも結果はついて来る
というローリー先生(スウォンジー大学)の言葉が私は好きです。
将来ロボットにかかわる仕事がしたいなら、つまらないと思うアイデアでも挑戦して造り上げてみることです。
そこにエネルギーをつぎ込み、いち早く製作に取り組めば大きな成果に育つかもしれません。
こんなアイデアはつまらない。
代わりがあるからもう必要ない。
誰かにつまらないと言われたから製作は止めよう。
そのような事は考えず、自分で思いついたアイデアを無駄にはしないでください。
また、カーネギーメロン大学の金出武雄先生が言っている「素人発想・玄人実行」の意識も大切です。
素人として、こんなものがあったらいいなと考え、玄人としてそれを造り上げる。
気をつけなければならいのは、素人目線で生まれたアイデアを玄人目線で潰さないことです。
そのためには、つまらないと思うことも含めて、様々な経験をつむ必要があります。
そして、金出先生の言葉でもうひとつ“KISS”( Keep it simple stupid )というキーワードがあります。
素人のように固定概念に縛られず、昔からのやり方や経緯にとらわれず、物事を単純にシンプルに考える。
先ほどのローリー先生の言葉と通じるものがあります。
私は、考えすぎて“つまらない思いつきを潰さない”ことがとても大切だと考えています。
昔ロボット顕微鏡を研究していた頃、移動する微生物をどのようにトラッキングするか悩んでいた時がありました。
その時、画像処理の難しいアルゴリズムを考えるよりも、ゾウリムシを一匹だけプールに入れればいいとう、シンプルな思いつきで解決することができました。
周りからは、ずるいと言われましたが、結果として一番簡単に解決することが出来たのだから、私は正解だと考えています。
みなさんは、考えすぎて大切な思いつきを無くさないでください。そしてその思いつきにエネルギーを注いでください。
橋本 浩一URL:http://www.ic.is.tohoku.ac.jp/ja/koichi/
生物移動情報学URL:http://navi-science.org/