

プロフィール
弘前大学 大学院理工学研究科
経歴
2009年10月~ 弘前大学 大学院理工学研究科准教授
2005年 6月~2009年9月 東北大学 大学院情報科学研究科助手・助教
2003年 4月~2005年5月 日本学術振興会特別研究員
無くならない大規模火災
もっと早く火災を収束させる方法はないのだろうか。
火災現場の中継を見て、そういった思いを抱く人は多いのではないだろうか。
昨年、那覇市の世界遺産、首里城で大規模な火災が起こり、「正殿」などの主要な建物が全焼したことは、記憶に新しい。
火が風にあおられ燃え拡がっていく中、消防隊は、火炎による熱の強さから、現場に近づくことができなかったという。
こういった事例を耳にすると、人の手で行う消火活動には、限界があるのではないかと思わされる。
そんな中、近年は消火活動にロボット技術が活用されるようになってきていることをご存知だろうか。
昨年4月に起こった、ノートルダム寺院での大規模な火災。その消火活動には、ドローンが活用されたという。
《ノートルダム大聖堂の火災》
出典:wikipedeia
ドローンに搭載された高精細の光学カメラと赤外線カメラが、上空から火災の状況をリアルタイムに中継した。
その映像は、効果的に消火するためにはどの方向から放水するべきかを判断するのに役立てられたという。
このように、これからの消火活動には、ドローンやロボットの活躍する場面が増えてくる事だろう。
今回ご紹介するのは、ロボットによる未来の消火方法を模索する研究者、岩谷靖氏である。
人に代わって、ロボットが火災現場に突入
岩谷氏が研究している消火ロボットは、どのような仕組みで消火を行うのだろうか。
その仕組みや研究を始めたきっかけについて、お話を伺った。
岩谷氏「我々が研究しているのは、消火剤が入ったバルーンを消火カプセルとしてドローンで直接火元に運び、より効率的な消火を図るロボットです。
消火ロボットが直接火元に突入し、熱によりバルーンが破裂することで、中の消火剤が火元にかかり、消火が達成されるという仕組みです。
このロボットを作り始めたきっかけは、同じ大学で燃焼工学を研究している鳥飼宏之先生の研究の話をお聞きしたことでした。
鳥飼先生は、遠くから水や消火剤を撒いても効率的な消火が難しく、また、水損・汚損などの多大な二次被害を招くことから、消火剤をつめたバルーンを用いて消火剤を直接的に火元に投入することで、火災の一時被害と二次被害を共に軽減する消火方式を考えていました。
ですが、そのバルーンを火元に持っていく手段に課題を持たれていました。
私は以前からドローンを研究のテーマとしていたので、その知識を消火ロボットの開発に活かせると考え、協力を申し出たことがきっかけです。」
https://www.youtube.com/watch?time_continue=11&v=5ybpflqig00&feature=emb_logo
《不活性ガスであるヘリウムをバルーンに搭載した消火ロボット(右)が、不活性ガスを火元に供給し、消火する様子》
鳥飼氏の燃焼工学の知識と、岩谷氏のロボット技術が合わさり出来上がった、人が立ち入ることが出来ない火災現場まで飛んでいき、効率良く消火を行う消火ロボット。
今後のビジョンについても、お話を伺った。
岩谷氏「今後は、煙で視界の悪い室内でも、消火ロボットが自ら火元を発見できるようにすることが目標です。
火元を発見するための手段としては、様々な方向に音を出し、壁から跳ね返ってくる音を確認する、という手段を模索しています。
実は、火元のある方角から返ってくる音は、何もない方角から返ってくる音よりも弱いということが実験で分かったんです。
消火ロボットにカメラ、スピーカー、マイクを搭載し、様々な方向に音を出して、返ってきた音に異常がある方向に進む、というシステムにしようと考えています。
将来的には、カメラ、スピーカー、マイク等のセンサーを搭載した司令塔係のドローンと、消火剤入りのバルーンを搭載した火に飛び込む役割の使い捨てのドローンをチームで投入し、消火活動に当たらせる形が良いのではないかと考えています。」
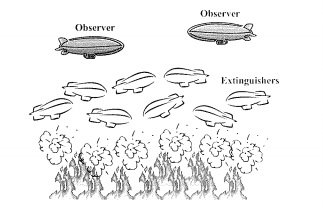
《消火ロボットの運用予想図》
未来の火災現場で消火ロボットを活躍させるため、消火ロボットの機能を進化させるべく研究を続ける岩谷氏。
研究へのモチベーションの源泉をお聞きした。
岩谷氏「僕は元々、ロボットをより効率よく動かすにはどうしたら良いか、ロボットをとりまく環境はどう動いているのか、という「動き」にとても興味があるんです。
例えば、消火ロボットの研究で、より効率良く消火をするための条件を調査していたとき、実験によってこんな興味深い結果が出たんです。
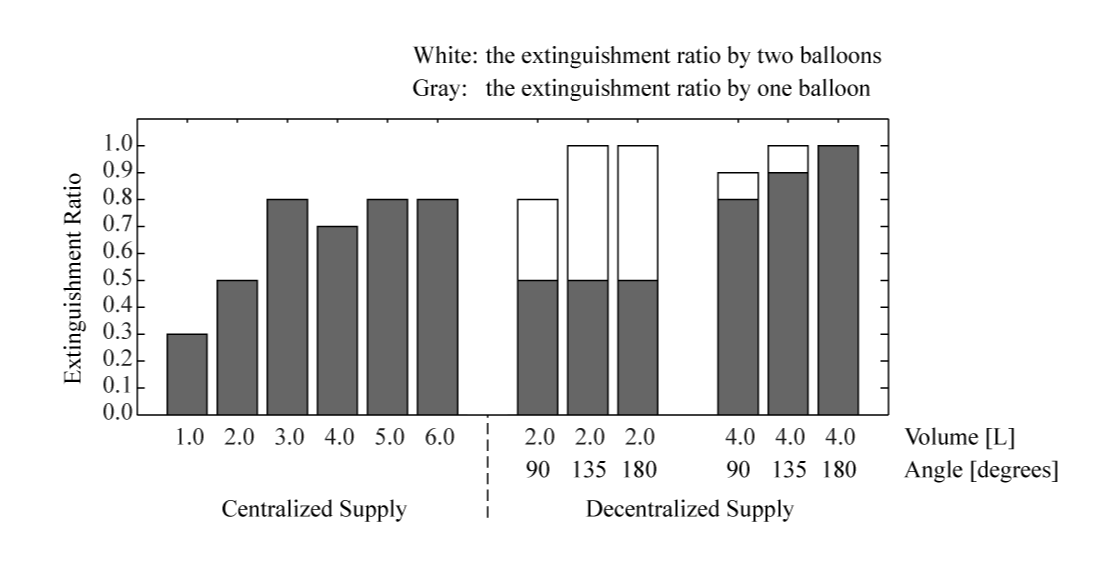
《(点線から左)ロボット1台での実験 (右)2台での実験
(縦軸)10回中消火が成功した回数
(横軸上)消火剤の量(横軸下)2台の位置の角度》
消火ロボットの台数や角度、消火剤の量を変えて実験を行ったところ、2台の消火ロボットで火炎を挟み込むように近づくやり方が一番確実に消火できるということが分かったんです。
このことから、確実に消火するには「壁」になるものが必要だということに気がつきました。
消火剤を撒いたときに、向こう側に何もないと消火剤が霧散してしまいます。
ですがこの実験では、2個目のバルーンが壁の役割を果たしてくれたおかげで、消火剤がその場にとどまり、確実に消火することができたのです。
このように、研究を進める中で今まで気がつかなかった火炎や空気の動き、最適なロボットの動かし方が分かる瞬間が、私にとって一番楽しい瞬間であり、研究のモチベーションになっています。」
好奇心の追求
ロボットをより良く動かすためにはどうしたらいいか、そのロボットを取り巻く環境の動きはどうなっているのか。あらゆる「動き」に興味があるという岩谷氏。
ロボットの「動き」に興味を持ち始めたきっかけは、幼少期の体験だったという。
岩谷氏「ロボット研究の道に進んだのは、両親が工場を経営していた影響が大きいと思います。
子供の頃からよく手伝いに行って、簡単な作業をしながら機械の様子を見ていました。
そんな時、一度同業の方の大きな工場を見学に行く機会があったんです。
体育館ほどの大きな敷地で、整然と動いている機械を見て「面白い!」と思ったのが、この分野に興味を持ったきっかけだと思います。
今も私は、こういうロボットを完成させたい、自分が完成させたロボットで世の中の役に立ちたいという目標よりも、自分自身の中の面白そう、知りたい、という気持ちを大切に研究しています。」
自分の中の好奇心を大切に研究を行っているという岩谷氏。
そんな岩谷氏の興味関心はロボットだけにとどまらず、生き物の動きにも向けられている。
岩谷氏「現在は、消火ロボットのほかに、虫の動きを観察するロボットも研究しています。
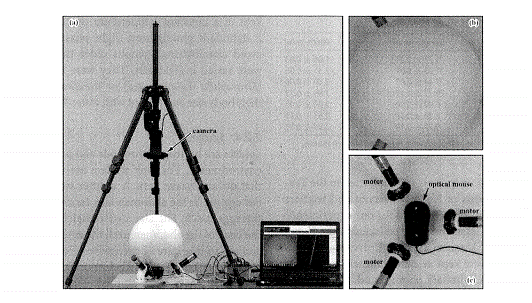
《無限平面装置 (a)全体図(b)カメラの視界(c)モーター》
これは無限平面装置といって、光や音といった刺激に対する虫の反応を、効率よく観察するために、歩き回る虫を一点にとどめておく機能を持っています。
球の真上に付いたカメラで虫の動きを撮って、その情報をコンピューターにフィードバックし、球の下にあるモーターを動かすことで、虫の歩く方向と逆方向に球が動く、という構造です。
《無限平面装置の上を走るクモ》
それにより、虫がどれだけ歩いたとしても地面はルームランナーのように動くので、どこにも移動させずに効率よく観察することが出来るのです。
この装置の構造自体は、1960年ごろにドイツの研究者の方が提唱していたものを、私がアルゴリズムや制御面を改良して使用しています。
このロボットは、最近では、沖縄の病害虫防除センターの方と病害虫の動きについて調べるために使っています。
彼らは、農作物に付く病害虫を駆除するためのトラップを研究しているのですが、精度の高いトラップを開発するためには、対象となる病害虫の特性を知らなければなりません。
病害虫がどのような刺激に対して、どのように反応するのか。
そういったデータを集めるのに、無限平面装置は有用です。
このように、現在は小さな虫を観察するロボットを研究中ですが、最終的な夢は地球全体の動きが分かる“地球シミュレーター”を造ることです。
現在の地球シミュレーターは地球の環境変動を予測、解明するものです。
ですが、もっと小さな、人間の動きから微生物を含めたすべての動き、気象や火災などの動きが地球規模で分かるシミュレーターを作り、それらを制御できるようになったら、面白そうだと思いませんか?
残念ながらそれは非現実的なので、まずは自分の手の届く範囲から、地道に解明していこうと思います。」
ロボットの動き、ロボットを取り巻く環境の動き、ひいては地球全体の動きまで、尽きることのない好奇心を胸に研究を続ける岩谷氏。
岩谷氏の研究姿勢は、飽くなき好奇心による研究の積み重ねが、いずれ人々の生活を守る技術につながっていくのだと教えてくれた。

岩谷研究室URL:http://www.mech.hirosaki-u.ac.jp/~iwatani/index.html