
プロフィール
 秋田県立大学 生物資源科学部
秋田県立大学 生物資源科学部
山本 聡史(Yamamoto Satoshi)准教授
経歴
平成 9年3月 京都大学農学部農業工学科 卒業
平成11年3月 京都大学大学院農学研究科地域環境科学専攻修士課程 修了
平成11年4月 特別認可法人生物系特定産業技術研究推進機構 研究員
平成21年4月 独立行政法人農業・食品産業技術総合研究機構生物系特定産業技術研究支援センター 主任研究員
平成28年4月 国立研究開発法人農業・食品産業技術総合研究機構農業技術革新工学研究センター 上級研究員
平成29年3月 国立研究開発法人農業・食品産業技術総合研究機構を退職
平成29年4月 現職
農業の新たな担い手
輸送技術が発達した今日、スーパーマーケットには国内外問わず、様々な産地から届けられた野菜や果物が並んでいる。
その中から、安心して食べられる食材として、国産のものを選ぶ方も多いのではないだろうか。
しかし、日本の農作物の生産現場には今、大きな危機が訪れている。
現在日本の農業は、従事者の深刻な高齢化と慢性的な労働力不足に陥っており、耕作放棄地が増え、農作業中の事故も多くなっているという。
農業従事者の高齢化に歯止めがかからないのは、後継者が見つからないことや、新しく農業を始める人が不足していることが原因だ。
ではなぜ、農業の新たな担い手が不足しているのか。
それは、作業の過酷さ、専門性の高さなどから、農業を始めることに対する敷居がとても高いからといわれている。
今回は、この状況を変えるため、作業を省力化するロボットを開発することで、農業をより楽しく、魅力的なものにしようと考える研究者、山本氏にお話を伺った。
大変な思いをしている農家さんを、ロボット技術で救いたい
山本氏は現在、イチゴ農家の仕事を助けるロボット開発に力を入れている。
これまで人の手で行われてきた作業をどのようにロボット化したのか、お話を伺った。
山本氏「秋田県立大学に来る以前、農研機構で働いていたころから、様々な大学や企業と協力しつつ、いろいろなタイプのロボットを研究・開発してきました。
その中でも私は、ヤンマーグリーンシステムさんと共同で行った、イチゴパック詰めロボットの研究開発に力を入れていました。
このロボットは、これまでイチゴ農家さんが手作業で行っていたイチゴの選果(果実を選別基準に基づいて振り分けること)作業と、パック詰め作業を行うものです。
収穫箱からイチゴを取り出し、大きさ別に振り分けたのち、パックにイチゴの向きをそろえて並べるという一連の流れをロボット化しました。
具体的には、始めに収穫箱からイチゴを取り出し、専用のトレーに移します。
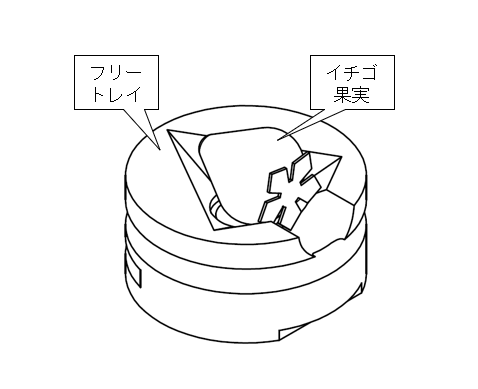
≪専用のトレーに載ったイチゴ≫
このトレーに載せることで、転がりや衝突によるイチゴの損傷を最小限に留められます。
特殊な凹みによってイチゴの向きが変化しないので、後のパック詰め作業の際、容易にイチゴの向きをそろえることができます。
トレーに載せられたイチゴは、次に選果ラインへと流れていきます。
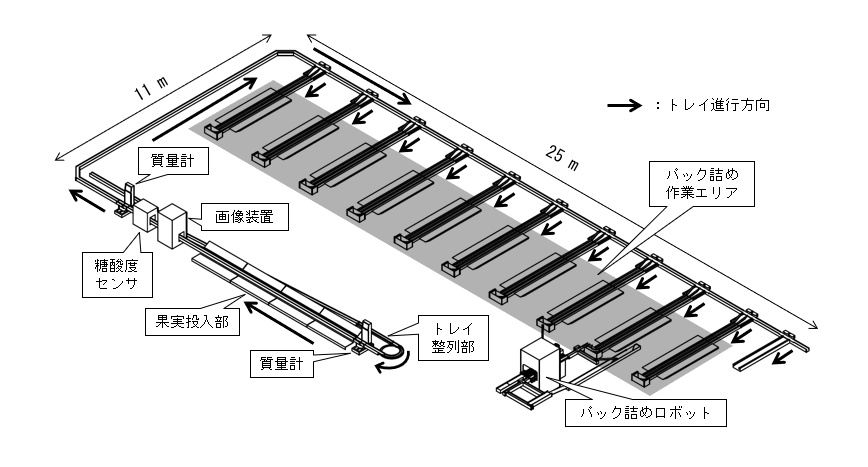
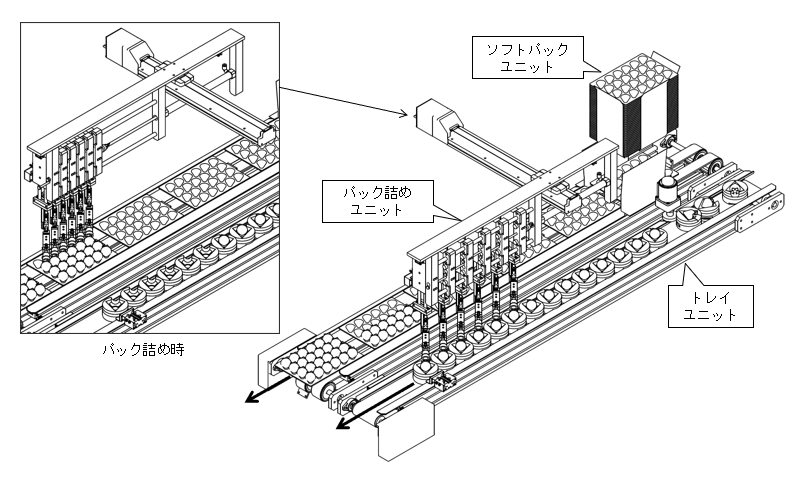
≪イチゴパック詰めロボットの作業の流れ≫
選果ラインでは、まず始めにカメラでイチゴを撮影し、画像処理によってイチゴの着色度合いと形状を確認します。
次にセンサーでイチゴの糖度を推定し、最後は質量計で質量を測ります。
選果ラインを通過したイチゴは、選別基準の基づいて振り分けられた後、パック詰め作業のエリアに流れていきます。
パック詰め作業エリアでは、専用のハンドを使ってイチゴをパックに並べる作業を行います。
まず、トレーを回転させてイチゴの比較的頑丈な、ヘタのある部分をハンドに向けます。
ハンドはヘタのある方向からイチゴを吸着し、パックに移します。
作業時間の短縮のため、6つのハンドが一気にこの作業を行います。
これでパック詰め作業は完成です。
≪ハンドがイチゴをパックに詰める様子≫
このイチゴパック詰めロボットでは、ハンドの部分の開発に一番苦労しました。
工業製品を扱うロボットと違い、このロボットをはじめとする農業用ロボットは、農作物を扱うため、対象の形状が一つ一つ異なります。
ヘタの大きさや葉の大きさ、果実の形の差異に柔軟に対応できるハンドを、いかに考えていくか。
それがイチゴパック詰めロボットを研究開発していく中での一番の難題です。
現在は、このロボットを小型化して、小規模な施設でも導入可能なものにしようと研究を続けています。
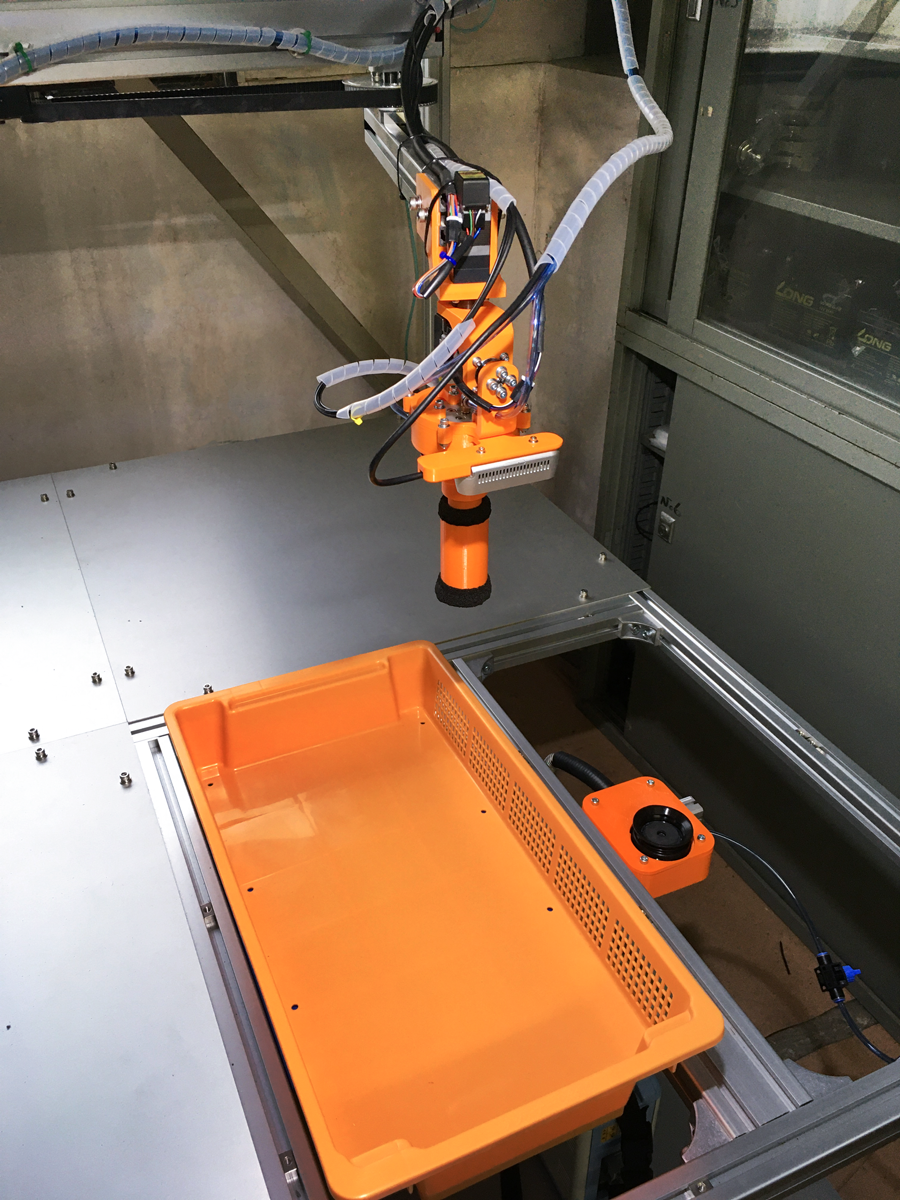
≪現在開発中のイチゴパック詰めロボットのアーム≫
難しい課題である、イチゴパック詰めロボットの研究開発を続けているのには理由があります。
イチゴはほかの農作物に比べて、収穫から出荷までの準備にとても時間と手間がかかるからです。
例えば、稲作は機械化が進んでおり、栽培面積当たりの作業時間は10アールあたり30時間ほどといわれています。
一方で、イチゴ農家の仕事はいまだ手作業によるところが大きく、10アールあたりにかかる作業時間は2000時間にも上るといわれています。
そして、この作業時間の4分の1は、パック詰め作業に費やされているんです。
ロボットによりその作業から解放されれば、農家さんはよりきめ細やかな栽培管理に時間を充てられるようになります。
イチゴ農家さんの負担になっている作業を省力化し、より農業を楽しむことができるよう手助けするロボットを目標に、研究開発を進めています。」
農業に魅力を感じてもらうためにロボットができることは何か
現在は、イチゴ農家の作業を省力化するロボットの研究開発に力を入れている山本氏。
将来はどんなロボットを造っていきたいか、そのビジョンをお聞きした。
山本氏「今後の目標は、作業を省力化するだけでなく、農業をより魅力的で楽しいものにするロボットを造ることです。
現在、農業の新たな担い手が減少しているのには、重労働や専門性の高さなど、敷居の高さが原因にあるといわれています。
ただ、作業の何もかもを自動化して楽にしてしまうのは、逆に農業の魅力を損なうことになるのではないかと私は考えています。
それよりも農業を、今農業をやっていない人から見て、やってみたい、楽しそうと思えるものに変えるロボットを造りたいんです。
では、魅力的な農業とは何か。その答えは人によって様々あると思いますが、私は、答えの一つとして「有機農業」があると考えています。
雑草や害虫対策として、現在は多くの農家で薬剤の散布が行われています。
ただ、環境への負荷を考えると、昔ながらの薬剤を使わないやり方を試みたいと考える方は多くいます。
薬剤を使わない除草・殺虫のやり方としては、例えば合鴨農法などがあります。

≪合鴨農法の様子≫
ですが、こういった昔ながらの方法は、手間がかかるうえ効果にばらつきがあるという難点があり、知識が豊富なベテランでないと行うのは難しいといわれています。
そこで、合鴨の代わりになるロボットだとか、合鴨の行動をある程度管理するようなロボットがあれば、農業初心者の方も気軽に合鴨農法に挑戦できるのではないでしょうか。
このように、専門性の高い農法に興味を持っている人たちが安心して挑戦できるよう、手助けになるロボットを造るというのが今後の夢です。」
未開の分野を切り開こう
山本氏から、これからロボット研究開発を志す人へ、メッセージをいただいた。
山本氏「少しでも興味がある方は、ぜひロボット開発に取り掛かってみてください。
数あるロボット分野の中で特に、私は農業用ロボットの研究開発をおすすめします。
理由としては3つあります。
一つ目は、今まさに農業分野でロボットが必要とされているからです。
農業分野には、今まで手作業に頼っていた仕事や、危ない仕事、つらい仕事、働き手が少なくなっている仕事など、ロボットが補い、替わっていくべき仕事がたくさんあるのです。
二つ目は、ロボットの研究開発がしやすい環境が整ってきたからです。
例えば、収穫ロボットの研究自体は、70年代から始まっていたのですが、その当時はセンサーやカメラの性能が悪く、現場で満足な働きができるロボットを造ることは非常に困難でした。
ですが現在は、画像処理の精度が飛躍的に向上し、性能の良い3次元センサーが手に入るようになり、AIの技術も目覚ましく発展しています。
それらを駆使することで、現場でも賢く判断して動けるロボットを造ることができるようになってきました。
三つめは、新しいことに挑戦できるからです。
ロボットを研究している人は世界中にたくさんいますが、農作物を対象にしたロボットを研究している人は、実はかなり少ないのです。
そのため、研究をする際に参考にできる事例が少ないという大変さはあります。
ですがその分、しがらみにとらわれず、ロボットを自分で1から設計する面白さがあります。
ぜひ、日本の未来の農業を支える新しいロボットを、自分の手で造り出してみませんか?」
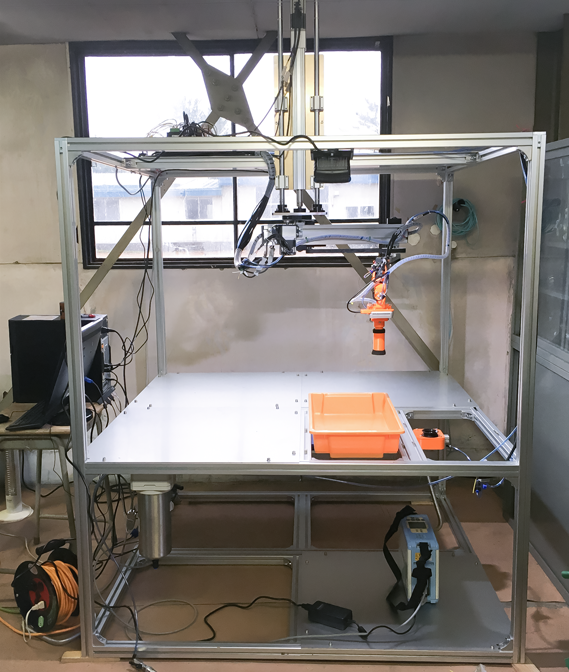
《現在開発中のイチゴパック詰めロボットの一部》
大学教員紹介URL:https://www.akita-pu.ac.jp/bioresource/AGRI/department_lecture_yamamoto.html