

プロフィール
田所 諭(Satoshi Tadokoro)

1984年 東京大学大学院修士課程 修了
1993-2005年 神戸大学工学部 助教授
2002年 国際レスキューシステム研究機構 設立
2002-2006年 文科省大大特レスキューロボPM
2005年 東北大学大学院情報科学研究科 教授
2006-2010年 NEDO戦略先端ロボットPI
2011年 福島第一原発事故にQuince投入
2012年 同 研究科長補佐,2014年 副研究科長
2014-2018年 ImPACTプログラム・マネージャー
2016-2017年 IEEE Robotics and Automation Society President
レスキューロボットという未知の研究分野を開拓
世界的なレスキューロボット研究の第一人者である田所氏。
現在“ImPACTタフ・ロボティクス・チャレンジ”のプログラムマネジャーとして、
極限の災害現場でも、へこたれずにタフに仕事ができる遠隔自律ロボットの実現を目指したプロジェクトの責任者として、日本のレスキューロボットの底上げを図るため活躍している。
田所氏がレスキューロボット研究に生涯を捧げる転機となったのが、1995年1月17日に起きた阪神・淡路大震災の被災地での経験である。
当時はレスキューロボットという研究分野すら確立されていない時代、未知の研究分野をどのように開拓したのか田所氏に聞いた。
田所氏「私がロボット研究を始めたのは、1984年に神戸大学の助手に着任したときです。
教授からは『何をやってもいいよ』と言われていたので、ロボットが面白そうかなと思い、本格的にロボット研究の道に進みました。
当時は産業用ロボットの全盛期でしたので、産業用ロボットの高度化をテーマに研究をしていましたが、それだけではもの足りなかったため、新しいロボットのメカニズムや人工筋肉、バーチャル・リアリティーなど、当初の研究テーマを超えた研究をしていました。
その後、1995年に阪神・淡路大震災を経験し、災害現場で使えるロボットを造りたいと思い、レスキューロボット研究を始めることになります。
しかし、当時は世界中どこを探しても、レスキューロボットを本格的に研究している人はいませんし、完全にSFの世界の話と思われていました。
『今のままでは、また震災が起きた時に人の命を助けられない。何かやらないといけない』と感じていた有志の仲間達が集まり、草の根からでも始めようと動きだしました。
始めた当初は本当に大変でした。
研究者の方から『震災でロボットが出来ることは沢山あるけど、それが学術研究として何の意味があるの?』と言われたり、ファンドの方からは『産業ロボットのファンドだから人命救助と関係ないよね?』など。
結局どこも『うちは関係ない』『うちも関係ない』と言われ、じゃあどうすればいいのって聞いてみると『知りません』『人命が大切なのは分かるけど、関係ないよね』と言われ続けました。
正直、当時は八方塞がりで、もうどうすればいいのか分かりませんでした。
そのような状況でも私たちはあきらめず、学会などで震災の被害にあった方たちと、様々なディスカッションを行いました。
また、レスキューロボットの単純な機能検証モデルを造ったり、コンピューター上でレスキューロボットのシミュレーションをするなど、予算がない中でも地道に研究を続けました。
その後、学会でレスキューロボットの部会を立ち上げ、研究課題を作ったり、ロボカップレスキューという競技会を立ち上げるなど、出来ることは全てやりました。
そんなある日、世の中を一変させる出来事が起きました。
それは2001年にアメリカで起きた9.11同時多発テロです。

当時、テロの現場で被災者や遺体と遺体の破片を捜索するためにロボットが使われたことが話題になり、日本でもレスキューロボットに大きな予算が付くようになりました。
2002年には私たちの研究チームのロボット研究が、文部科学省の大大特(大都市大震災軽減化特別)プロジェクトという、大きなプロジェクトに採択されました。
1995年の震災から7年の歳月が流れていましたが、やっと念願が叶いレスキューロボットの研究開発に集中できる環境が整ったのです。
このプロジェクトでのレスキューロボット研究の目的は被災地での“情報収集”でした。
レスキューロボットが災害時に様々な救援対応をするためには、現場の情報収集が非常に重要になります。
もし、被災地で救助を求めている人がいる場所が分からなければ、そもそも助けることすらできません。
情報収集する方法としては、飛行するロボットが上空から地上を調査し、瓦礫に潜り込むロボットが救助を求めている人の情報をセンシングして収集します。
また、収集した情報を集約し、地図上にマッピングして、救援対応する方へ情報を提供します。
当時、上空の調査をするドローンはなかったので、ヤマハの農薬散布用のヘリを改造し、自律制御で飛ばして、災害状況や被災者の情報を収集しました。
また地上では瓦礫の上を走行して調査できるクローラーロボットや、瓦礫の中に潜り込んで調査できるヘビ型ロボットなどを開発しました。
また、建物が崩れた時に、人がいる場所を推定するデバイスも開発しました。
デバイスは建物の中にいる人の音声や映像などを、外に配信するデバイスで震災時に外に家の人の情報を配信します。
例えば、家のお婆ちゃんが行方不明の場合、『震災時刻の朝6時ぐらいは、いつも起きて仏壇の前でお祈りをしています。』といった推定情報を提供することで、家が倒壊した時にどこに人がいるかある程度わかるといったものです。
当時、消防の方と緊急援助のデモンストレーションなど、様々なことを行いましたが、技術的な課題もあり、現場に配備されるというところまでには至りませんでした。」
レスキューロボットの鍵となる“信頼性の確保”とは?
2002年からスタートした大大特プロジェクトの情報収集フェーズで新しいロボットのプロトタイプを生み出した田所氏。
2006年から始まるNEDO戦略先端ロボットPIプロジェクトで、レスキューロボットの研究はいよいよ実用化フェーズへ突入する。
(関連URL:ロボット革命実現会議 ロボット関連施策の取組について 内閣府)
このプロジェクトのテーマは“地下街で使えるレスキューロボット”。
地下街でのガス漏れ爆発や地下鉄サリン事件のようなケースで、倒れている被災者を捜索することが目的のロボットだ。
プロジェクトへの要求レベルは高く、ロボット性能の数値化と社会で役に立つという2点だった。
そのため、田所氏たちは実践で使えるようにするため試験に力を入れ、アメリカのテキサスにあるディザスタシティという消防士の訓練施設まで行き、瓦礫がある専門の試験場で性能試験を実施した。
その後、神戸市や仙台市の地下街での実証試験を行い、完成したレスキューロボットが“クインス”だ。
田所氏「NEDO戦略先端ロボットプロジェクトでは、被災者を捜索するという目的を実現するために、瓦礫が散乱する不整地の環境で何が出来ればよいか、ということが大きな課題でした。
課題を解決するために、不整地での移動能力を高め、環境を把握するための3次元マッピングシステムを作り、地下での無線通信を確立するという3つの目標を定めて研究開発を進めました。
プロジェクトも順調に進み、アメリカのテキサスでロボットの最終の試験をしていた頃、東日本大震災が起きました。
私たちは急遽予定を切り上げ帰ってくると、福島原発の建屋が爆発しており、状況は深刻で人が入れない状況でした。
直ぐにロボットを導入する必要がありましたが、残念ながら当時は瓦礫が散乱し、急勾配の階段がある原発で使用できるロボットは存在していませんでした。
私たちロボット研究者はこの事態に対応できるロボットがないという現実に、歯がゆさを感じたことを今でも鮮明に覚えています。
しかし、もしかしたら我々がつくった“クインス(Quince)”なら役に立てるかもしれない、という直感もありました。
“クインス”は放射能の対策は想定していませんでしたが、運動能力でこの”クインス“に勝るロボットは世界中を探してもありませんでした。
また、私たちが住む仙台市は原発から100km圏にありましたので、このままいくと私たちの街も住めなくなる可能性が大いにありました。
“何とかしないといけない”と、“これができるのは我々しかない”と強い使命を感じ、“クインス”の原発用カスタマイズの開発が始まったのです。
ある日、アメリカ軍から510 PackBot(パックボット)というロボットが東京電力に寄付されました。
しかし、パックボットは瓦礫が多い場所での移動が出来なく、傾斜が35度以上の階段は登れないロボットでした。
4月に放射線が飛び交う中で作業員の方がパックボットを原子炉建屋の入り口の所まで運び込み、その後パックボットが数十メートル走り、建屋入口付近の放射のレベルの情報等を収集することに成功しました。
そして6月には、私たちが原発仕様にカスタマイズして完成させた、レスキューロボット“クインス”を建屋内に投入しました。
建屋内は冷却が上手くできていないようで湿度は98%と高く、いつ水蒸気爆発が起きてもおかしくない状態でした。
爆発を回避するためには、冷却装置を造り直して冷却する必要がありましたが、冷却装置を稼動させるためのバルブは建屋の2階にあり、そのバルブをちゃんと回せるのかも分かりませんでした。
当時、バルブを回す作業が出来るロボット自体ありませんでしたので、人間がやるしかありません。
そのためには、建屋2階に人間が入って作業をするために、放射能のレベルや瓦礫の状況などの情報収集をすることが課題となり、その解決策を東京電力は求めていました。
その課題を解決するため7月にはクインスが建屋2階まで上がり、建屋内の映像や写真を撮り、放射能のレベルを調べ、詳細なマップをつくりました。
そして、その情報を元に冷却するためのプランができ、工事が完成し、温度を下げることに成功することができたのです。
このクインスを原発仕様にしていく上で、一番大変だったのは信頼性の確保でした。
そもそも大学で研究用のロボットとして造っており、実用版とは言っているものの、今回のようなタフな環境での仕様に耐えられるようには造っていませんでした。
もし原発の中で、ロボットが万が一動けなくなった場合、調査の邪魔になるだけではなく、核廃棄物を増やすことにもなります。
信頼性を確保するためには、ロボットの機能面での信頼性の高さは当然で、更に人間がミスを犯さない設計にすることが求められます。
操作する人にとって使いやすく、直感的に動かせるようにすることで、失敗の可能性を低くすること、それが信頼性を確保する上で非常に重要なポイントでした。
要求を満たすための開発をしてロボットの信頼性を確保し、無事に現場に投入することが出来ました。
そして私たちの研究は、瓦礫の中など狭いところに潜り込んで被災者を調査する、ヘビ型ロボット“能動スコープカメラ”などのレスキューロボット研究へシフトして行きました。」
“ヘビ型ロボット”実用化への壁
阪神・淡路大震災や東日本大震災に代表される大規模災害が起きたとき、倒壊した建物内に取り残された被災者の発見と救助は、災害時の大きな課題となっている。
田所氏が開発したヘビ型ロボットは、倒壊した建物の瓦礫の中から被災者を探すことが目的のロボットだ。
2002年の大大特プロジェクトで開発したロボットを、更に性能アップさせ、実用化に近づける研究が始まる。
田所氏「ヘビ型ロボットの実用化研究のきっかけは、2011年の東日本大震災で災害時に役に立つロボットが日本にはないことが分かったことでした。
原発を収束させるために、冷温停止するにはどうしてもロボットが必要でしたが、当時ロボットを実現するためのロードマップを誰も持っていませんでした。
これに危機感を抱いたCOCN(産業競争力懇談会)という団体が中心となり、政府に対して何をすべきか提言するため“災害ロボットプロジェクト”を立ち上げました。
私はワーキンググループのリーダーとして、原発の冷温停止のロボットを造るために何をすべきで、何をつくる必要があるのかを提言しました。
その後、COCNのメンバーである経団連の企業の方や、省庁の皆さんの意見を国への提言として取りまとめ、多くの提言が政策として取り上げられました。
その提言により様々なロボットが開発され、廃炉計画立案の前進にも繋がったのです。
その後、提言の一つであった災害ロボットの実用化を推進する国内プロジェクトの立上げが正式に決定し、2014年11月より“ImPACTタフ・ロボティクス・チャレンジ”がスタートしました。
私はプロジェクトの総責任者として、社会的な価値の高い研究成果を出せるよう、参画者の方々が研究開発しやすい環境造りなどの役割を担っています。
また、平行して研究者としてヘビ型ロボットの研究開発も行ない、これまで研究してきたヘビ型ロボットの3つの課題を解決しました。

1つ目の課題は、ロボットがヘビのように地上を這うだけでは、被災者を探し出すのは難しく、根本的に運動性能が全く足りないということでした。
ロボットは瓦礫の上から下に向けて隙間に入っていくのが関の山で、下から上に上がることは出来ませんでした。
その課題を解決するために、ロボットを空気で浮かせて制御することで運動性能を向上させました。
2つ目の課題は、ロボットが瓦礫の中に入った際に、ロボットがどこにいるのかが全然分からないということでした。
カメラの映像を見ても、瓦礫の直ぐそばの映像しか見えないため、その場所がどこなのか見当もつきません。
その課題を解決するために瓦礫のマップを作り、ロボットの位置が座標で分かるようにするため、瓦礫の中に入ってカメラや音響の技術を使って、自分の位置を特定する技術を開発しました。
3つ目の課題は、救助を求めている人の情報を、瓦礫の中で収集することです。
これでは被災者を見つけても、正確な位置や生体の情報が分かりませんでした。
その課題を解決するために、被災者の位置などの情報を収集するため、複数個のマイクを使って人がどこにいるのかを推定したり、音にノイズが乗ってる時に消す技術などを開発しました。
現在のヘビ型ロボットの課題は、現場の人にとって使いやすいシステムにして、現場で使ってもらえるようにするということです。
将来的には消防隊員の方が一人で背負って現場に持って行き、簡単に使えるロボットを目指しています。」
ロボットはヘビからドラゴンへ進化
田所氏が研究開発した最新のロボットは、今年メディアを賑わした消火活動を支援する“ドラゴン・ファイヤー・ファイター”である。
このロボットは、世界初の空飛ぶ消火ロボットで、ホースが浮上して建物に突入し、火元を直接消火する画期的なロボットだ。
ImPACTタフ・ロボティクス・チャレンジのプロジェクトで従来のヘビ型ロボットが空気を噴射させて浮き上がる仕組みを、水に変えることで飛躍的に浮遊能力を向上させた。
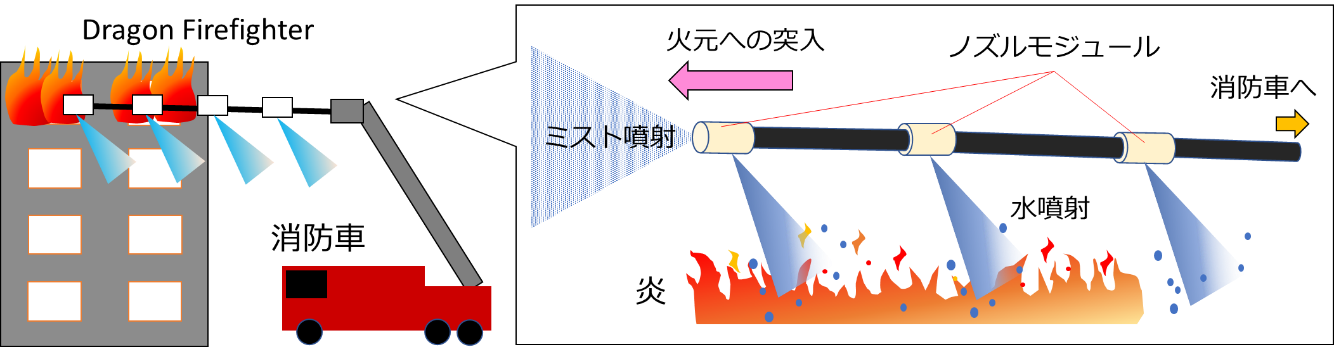
田所氏「従来のヘビ型ロボットは空気噴射だったため浮き上がる力が小さく、ロボットの先端が鎌首をもたげる程度でした。
今回、水を使用することでボディー全体が浮き上がり、まさに竜のように飛ぶロボットになりました。
私たちはこのロボットでこれまで消火が難しかった、高層ビルや森林の火災消火や、木造家屋が密集した場所の火元消火が出来ることを目指しています
その目標を実現するために大きく3つのゴールを設定しました。
一つ目のゴールは実用的に使えるシステムを作って、実験ではなく本物の火災現場に入っていき、火を消せるようにするということです。
次のゴールはロボットの全長を10mにすることです。
現在の全長3mのロボットでは、実際に火災現場で使ってもらうには短いため、最低でも10mくらいのロボットが飛ばせるようにする必要があります。
そして、最後のゴールが実用的な運用方法です。
消防士の方が火災現場にロボットを持っていき、自分達で消化する方法を提供することです。
これらを実現して消防士の方に使ってもらえた時、このロボットは完成だと考えています。
また、評価指標としては、テクノロジー・レディネス・レベル指標で、レベル8から9を目指しています。
ちなみにテクノロジー・レディネス・レベルとは、技術成熟度レベルという概念で、ロケットや国際宇宙ステーションなど、宇宙分野のプロジェクトで使われてきた指標です。
この概念は、技術が赤ん坊のようによちよち歩きの産声を上げてから、実際に世の中で広く使われて役に立つというレベルになるまでを9段階のレベルに分けて考えます。
現在の“ドラゴン・ファイヤー・ファイター”は、実験空間で機能が確認されたというレベルなのでレベル4くらいです。
実践で使われるためには、最低でも実証実験で火が燃えている家屋を消火できた段階のレベル7をクリアーする必要がありますが、正直まだまだ課題が沢山あります。

今後の私のロボット研究の目標は“ドラゴン・ファイヤー・ファイター”などのロボット達を、きちっと仕上げていきたいと考えています。
新しいロボットを創ることはもちろんやりますが、その本質はユーザの課題を解決することにあります。
そして、それを実現するために、ユーザの方々と一緒に考えて、形にしていく。
新しいロボットを創るということに価値はあまりなく、大切なのはユーザの課題を解いていく、それも他の人が出来ないことで、そこに価値があると考えています。
今回お話した“ドラゴン・ファイヤー・ファイター”も消防隊員の方からお話をお聞きし、消火の問題を解ける手段はないのかと考え研究することで完成しました。
2017年2月に起きたアスクルの倉庫火災では13日間にわたり炎上しましたが、ロボットが入って消火できれば、あっという間に消化できた可能性があります。
私たちは、このような火災で最も危険な場所にロボットを投入して消火し、その後消防士の方が入ることで安全性を向上させる道具として、配備されることを目指しています。
将来、『このロボットがあって良かった』と言ってもらえる日を目指し、研究開発を推進しています。」
レスキューロボット研究の原点と未来
田所氏が子どもの頃好きだったのは鉄腕アトムと電子工作だった。
東京大学に進学後、ソフトウェアをつくりたいと思った田所氏は、秋葉原に行きパソコンの部品やCPUなど買い、パソコン雑誌を見ながらパソコンを作り上げ、ソフトウェアを開発するなど、当時からものづくりが好きな青年だった。
ロボットとの出会いは、修士時代に手伝った原子炉メンテナンスロボットの開発だったが、その後どのようにしてレスキューロボットの道に進んだのか話を聞いた。
田所氏「私のレスキューロボット研究の原点は、阪神・淡路大震災です。
あの震災では沢山の方が亡くなり、みんな本当にひどい目にあいました。
そして私はロボットがなんの役にも立ってないことに落胆しました。

『子どものころ夢見たロボット達は、そうじゃなかったはずだ。』
私が子どものころ好きだった鉄腕アトムは二足歩行で歩きました。
でも、鉄腕アトムの真髄はそこではありません。
人が困っている時に助けてくれる、それが鉄腕アトム。
正義の味方のロボットだったのです。
しかし、あの日、正義の味方のロボットは出動しなかった。
存在もしていませんでした。
そもそも、人命を救助するロボットの研究者もほとんどいませんでした。
その時私は、今度震災が起こった時、また何も出来ないのはいやだ。
被災地で本当に人の役に立てるロボットを造ると覚悟を決め、レスキューロボットの道を拓くことに決めました。
私のロボット研究の使命は『ロボットが人命を救助出来る世界をつくること』です。
その実現のためにこれまで沢山のロボットを造り続けてきました。
そして、ロボット研究で大切にしてきたことは、実用的なロボットだけでなく、基礎的なレベルのロボットも沢山つくることです。
なぜなら、山は裾野があるから山であるわけで、裾野のない山というのは存在しない。
研究も一緒で基礎や基盤があるから高いレベルのロボットができてきます。
とはいえ、レスキューロボットは、大学が山の頂上にたどり着かないといけないと考えています。
普通、大学での研究開発はテクノロジー・レディネス・レベルで、レベル1から5までをやるのが生業だと言われており、レベル8や9は企業がやるのが一般です。
しかし、レスキューロボットの分野は、産業規模が大きくないため民間企業は積極的に参入してくるような分野ではありません。
もし、誰もやらなければ、レスキューロボットの実用的な研究開発の穴は開いたままになってしまいます。
そのために誰かが、その穴を埋める必要があります。
本来でれば、国の研究所が役割を担うべきですが、必要な技術の幅広さに比べて規模が十分でなく、そもそもロボットだけを研究していればいいわけでもありせん。
誰もできないのであれば、私たちがこのレスキューロボットのレベル向上の役割を担っていく必要があると考え、これまで研究開発を推進してきました。
また、ロボカップレスキューの競技会を立ち上げたり、世界中の人がレスキューロボット研究を継続するための環境をつくってきました。
今後はレスキューロボット産業の方向性を定めて、後進を育てる環境づくりにも貢献し、災害のソリューションを導き出す力を発揮できる研究者を育てて行きたいと考えています。」
ロボット研究者 田所氏よりメッセージ
田所氏「私は昔から『人と違うことがしたい』と考えて生きてきました。
今も研究者として『人ができない価値をつくりたい』と思っています。
そして人が出来ることは、出来る人にやってもらえばいいとも思っています。
研究者は論文を書くために新しさを求めます。
しかし、月並みな新しさと、誰もやったことがない新しさがあって、そこには大きな違いがあります。
また、誰もやったことのない新しさという中には、やっても仕方がないから誰もやらなかったというものもあります。
私がいう『人ができない価値をつくりたい』というのは、社会にとって価値があって、誰もやっていない新しい価値をつくりたいということです。
それを実現するためにロボット研究で大切にしたことは『あきらめないこと』でした。
いや、あきらめたくないというのが正しいですね。そう、あきらめたくない。
そして、夢は見るものじゃなくて、夢の実現に向かって歩んで行くものということを大切に、これまでの研究人生を歩んできました。
その歩みは三歩進んで二歩下がる。だから、あきらめないことが大切なんです。
これからロボットクリエーターを目指される方は、色んなことにチャレンジして欲しい。
小さく縮こまってしまわないで、前向きにチャレンジして、自分の能力を最大限に発揮して欲しいなって思います。
『そのためには大きな絵を描くことが必要です。』
私もこれまで色々やってきて、九割九分は失敗で、うまく行ったものはわずか1%位です。
みなさんは、周りの目を気にせず、失敗を恐れず、チャレンジして欲しい。
時には辛い日々もありますが、そのときは『あきらめたくない』という精神で乗り切りましょう。
最後になりますが、皆さんが生きる未来は、生み出したテクノロジーの価値を、社会に定着させていくことが問われる時代です。
研究者の中にはサイエンティックキュリオシティを重視したいと考える方もいますが、レスキューロボットの分野ではその考え方は成り立たちません。
将来ロボットの世界で活躍したい方は、社会の役に立つ価値のあるロボットを造り、定着させることまで意識してチャレンジしていきましょう。
東北大学 田所研究室 – Tohoku University:https://www.rm.is.tohoku.ac.jp/
タフ・ロボティクス・チャレンジ:http://www.jst.go.jp/impact/program/07.html