
プロフィール
阿嘉倫大(あか ともひろ)
株式会社EWデザイン スケルトニクス事業部 マネージャー

経歴
2020年10月 株式会社EWデザイン
スケルトニクス事業部マネージャー就任
2019年1月 同社代表取締役辞任 同社マネージャー就任
2016年4月 同社代表取締役社長就任
2013年10月 スケルトニクス株式会社設立 同社取締役CTO就任
2015年3月 首都大学東京システムデザイン学部
ヒューマンメカトロニクスシステムコース卒業
2010年3月 独立行政法人沖縄工業高等専門学校
機械システム工学科卒業
モノ作りが好きでロボット開発へ
阿嘉氏は「モノづくり」が好きで、幼少期は折り紙に熱中したり、大工道具を使って遊んだりしたという。
モノづくりへの興味から沖縄工業高等専門学校機械システム工学科に入学。
4年次までロボットコンテスト(以下、ロボコン)に熱中した。
その後、研究生となり、スケルトニクスを開発した。
研究生を終えた後は、東京の大学に編入。
大学在学中に、もっとモノづくりがしたいとスケルトニクスを法人化した。
それでは、一体なぜスケルトニクス開発に至ったのだろうか。
 スケルトニクス
スケルトニクス
スケルトニクス開発のきっかけ 三次元閉リンク構造
高専時代にスケルトニクスを開発、大学時に法人化をした阿嘉氏。
スケルトニクスを開発した経緯についてお聞きした。
阿嘉氏「4年次の最後のロボコンで使用していた“リンク機構”がきっかけです。このリンク構造を使って、もっと色々できるのではないかと感じたんです。
外骨格拡張ロボットも作れるのではないか?と考え、開発に着手しました」
ロボコンで使用した「リンク機構」がアイデアの源だったと語る阿嘉氏。
三次元閉リンクとは、スケルトニクスの肩部分に用いられている平行リンクを駆使した特殊な三次元の閉リンク構造である。
※2022/01/14追記:「三次元閉リンク構造」は特許技術となっております。
スケルトニクスは、一般的なパワードスーツとは異なり、電気・モーターを使わず、あえて特殊な三次元の閉リンク構造を用いている。
この構造により、外骨格が装着者の動きに連動するため、搭乗者は無動力で外骨格の四肢を操作できる。他にもスケルトニクスには多数のリンク機構が搭載されており、自由度の高い身体動作を可能としている。
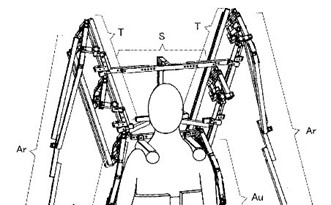
三次元閉リンク構造が使われているスケルトニクス肩部
スケルトニクスの構造段階でモーターを使わず、三次元閉リンク構造により、機体を動かすことを決めていた阿嘉氏。
初号機の開発に半年費やしたという。
阿嘉氏「初号機開発には半年くらいかかりました。
上半身に関しては思い通りできたのですが、下半身は重さの面で少し妥協しました。
操縦者のことを考え、なるべく軽く作りたかったのですが、下半身は体重を支える部分なので、強度を求められます。
そのため、軽量化が難しかったです。
また、人の動きを拡大すればするほどに人の力も必要になりますし、機体も重くなります。そこのバランスが非常に難しかったですね」
機体の重さと動作のバランスの中で試行錯誤しながらスケルトニクス初号機を作り上げた阿嘉氏。
このバランスへの挑戦は現在まで続いているという。
改良を重ね、第1世代から第7世代へ
三次元閉リンクによって「外骨格拡張ロボット」を実現した阿嘉氏。
現在、売り出されているのは、その第5世代だという。
阿嘉氏「高専時代に初めて完成されたスケルトニクスを第1世代と呼んでいます。
第1世代は、“外骨格拡張ロボットを作る”というコンセプトが確認された、いわば試作機でした。そのため、機体の重さなど課題も多くありました。
そこから、“運用性の改善”を軸に、第2世代、第3世代と改良を重ねてきました。現在は、第5世代を安定板として、製品としています」
第1世代で判明した装着にかかる時間の長さや、機体の重さなど、運用性を改善するために、改良を重ねたスケルトニクス。
第2世代では、腕の部分の構造を主に改良することによって、装着時間の短縮化に成功。
第4世代では、既製部品と外注加工の積極的な活用による製造の体系化と機体性能の安定化を実現。
第5世代では、いままで上半身と下半身がわかれていた機体に背骨を通すことにより繋げた。これにより、肩への負担が軽減。装着時の装着時の身体への負担を軽減し、装着していられる時間が伸びた。
現在はより軽量化を実現するため、第7世代を開発しているという。
阿嘉氏「ゼロから設計をし直すことで、今のスケルトニクスの半分の重さにしたいと思っています。
軽量化することによって、今まであったロボットの輸送負担の軽減、装着可能時間の延長が可能になります。そうすることで、スケルトニクスの活躍の幅は更に広がり、一般の方に見てもらえる機会が増えるでしょう」
作ったから、見てほしい
長年改良を重ねることで、スケルトニクスの可能性を広げている阿嘉氏。
今後のスケルトニクスの活躍フィールドをどのように考えているのだろうか。
阿嘉氏「実は、僕は“何に使ってほしい”みたいなのはあんまりないんです。
ただ、いろんな人にみてほしい。
直接ね。
スケルトニクスを訪ねて来られる方は、事前に動画を見てこられる方が多いです。
けど、やっぱり実物をみると“動画よりすごい!”って感動してくれるんです。
僕はスケルトニクスの最大の魅力ってそこだと思うんです。
だから、たくさんの方に実際に見てほしい。
そのためにも、活躍の場を広げたり、装着できる時間を増やすために、改良を続けています」
自ら開発したロボットを多くの人に知ってほしい、感動してほしいという思いを抱く阿嘉氏。
その原動力は、やはり「ロボットが好き」という思いなのだろうか。
阿嘉氏「僕はロボットが好きというよりかは、モノづくりが好きなんです。その延長線上にロボットがあります。
ロボットを作っていると、よく好きなロボットアニメを聞かれるんですが、スケルトニクス開発のインスピレーションとなったロボットアニメという点では特筆すべきものはありません。
スケルトニクスを開発した理由も、“リンク機構”を活用したら外骨格拡張ロボットができるのではないか?という技術的関心からでした。
事業化する上では、“何のために”というビジネスの目的が必要ですけど、作った時は目的みたいなのはないんですよ。自分で事業化しておいてなんですけどね(笑)」
ただ「つくる」のが好き。
その思いで、高専時代からスケルトニクスに携わってきた阿嘉氏。
どのようにスケルトニクスの改良を続け、どのようなロボットを産み出していくのか期待したい。
また、阿嘉氏の技術的興味によって産み出されたスケルトニクスがどのような場所、方法で使われていくのか楽しみである。
