

プロフィール
東北工業大学 工学部 電気電子工学科
丸山次人(Maruyama Tsugito)教授
経歴
1980 :(株)富士通研究所入社 ロボットグループに配属
1980-1986:産業ロボットによる生産ラインの自動化の研究
1987-1994:宇宙開発事業団委託「宇宙用ロボットの研究」
1995-1997:NTT向け交換機用ピン挿抜ロボットの研究
1996-1998:通産省プロジェクト「食事搬送自動移動ロボットの開発」
1999-2001:磁気ディスク装置のメカ・制御技術の研究
・ロバスト制御/空気流解析技術/1.8HDD試作機
2002-2008:磁気ディスク装置の装置化技術(メカ・制御・信号処理)の研究
・垂直磁気記録方式の装置化/浮上面設計
・制御パターンの一括磁気転写技術の研究
2009-2012:モデルベース制御に基づく環境・エネルギー制御技術の研究
・エンジンの排ガス低減モデル予測制御
・高効率電源回路のデジタル制御
2013 :東北工業大学工学部へ着任 現在に至る
誰もが安心して暮らせる人にやさしい社会の実現のために
街中には、目が見える方は気が付かない、目の不自由な方にとって危険な場所があふれている。
例えば、駅のホーム。
目の不自由な方に「欄干(らんかん:橋などの手すり)のない橋」と例えられるこの場所で、誤って線路に転落してしまう目の不自由な方は後を絶たない。
 ≪ホームドアのない駅のホーム≫
≪ホームドアのない駅のホーム≫
出典:wikipedia
国土交通省によると、全国の駅で列車に接触して亡くなった目の不自由な方は2010年~2018年で13人に上る。
つい先日も、目の不自由な女性が線路に転落し、入ってきた電車とホームの間に体を挟まれて死亡するという痛ましい事故が起きている。
また、誘導音が鳴らない横断歩道も、目の不自由な方にとって危険な場所のひとつだ。
誘導音が鳴らない場合、目の不自由な方は周りの音や人の流れによって状況を判断し、危険を覚悟して渡らざるを得ない。
2年前には、目の不自由な方が、早朝で誘導音の鳴らない横断歩道を赤信号のタイミングで渡ってしまい、車にはねられて亡くなるという事故も起きている。
私たちが普段何気なく外出に使っている道は、「目が見えること」を前提として整備されている。
バリアフリー化が進んできているとはいえ、目の不自由な方々にとっては、非常に危険で、不親切な状態のまま放置されている問題が数多くある。
上に挙げた以外にも、普段から大小さまざまな危険に直面し、外出すること自体をあきらめしまう方も多い。
今回紹介するのは、そんな現状の課題を解決するべく、目の不自由な方の目の代わりとなるロボットを探求する研究者、丸山氏だ。
企業での経験を生かして
現在、目の不自由な方の目の代わりとなるロボットの開発を行っている丸山氏は、33年間企業の研究者として活躍後、大学教授となった異色のキャリアを持っている。
企業ではどのような研究を行ってきたのか、お話を伺った。
丸山氏「企業時代は、専門の制御工学をベースに、産業用ロボットの研究、宇宙用ロボットの研究、磁気ディスク装置の研究、エンジンの制御など、幅広い分野に携わってきました。
その中でも特に現在の研究に大きな影響を与えているのが、“食事搬送自律移動ロボット”の研究開発です。
食事搬送自律移動ロボットは、介護福祉施設や病院で介護士や看護師の代わりに各部屋を回り、配膳・下膳作業を行うロボットです。

≪食事搬送自律移動ロボット 福ちゃん≫
ロボットの開発の際、特に重要だったのが、自律性、安全性、親和性です。
まず、このロボットは障害物にぶつかることなく移動し、各部屋を巡回する自律性を備えています。
廊下を移動するときは、カメラで廊下の縁を検出して、廊下の真ん中を移動し、障害物があった場合には、レーザ距離センサや超音波センサで位置を把握して、ぶつからないように回避することができます。
また、介護福祉施設や病院で使用するため、患者や職員にぶつかって危害を加えないよう、安全性にも配慮した設計になっています。
具体的には、ロボットが物に接触したら即座に停止するよう、ロボットのボディや配膳・下膳を行うアームには接触センサが取り付けられています。
さらに、ぶつかっても相手に怪我をさせないよう、ボディやアームの最も外側はやわらかい素材でできています。
環境変化に対応し自らの判断で動く自律性、使用者や周りの人に危害を与えない安全性、人にやさしいデザインや表情による親和性を持ったロボットの開発に関わった経験、そこで培った知識と技術は、現在の研究のベースになっています。」
目の不自由な方を安全に導くロボット
食事搬送自律移動ロボットの研究で培った知識と経験を生かし、丸山氏は現在、ガイドロボットを開発している。
このガイドロボットとはどのようなものなのか、その機能や仕組みについてお話を伺った。
丸山氏「私が現在開発に力を入れているのが、目の不自由な方の目の代わりとなり外出をサポートする、ガイドロボットです。研究を始めた2016年4月から、少しずつ課題を解決してきました。
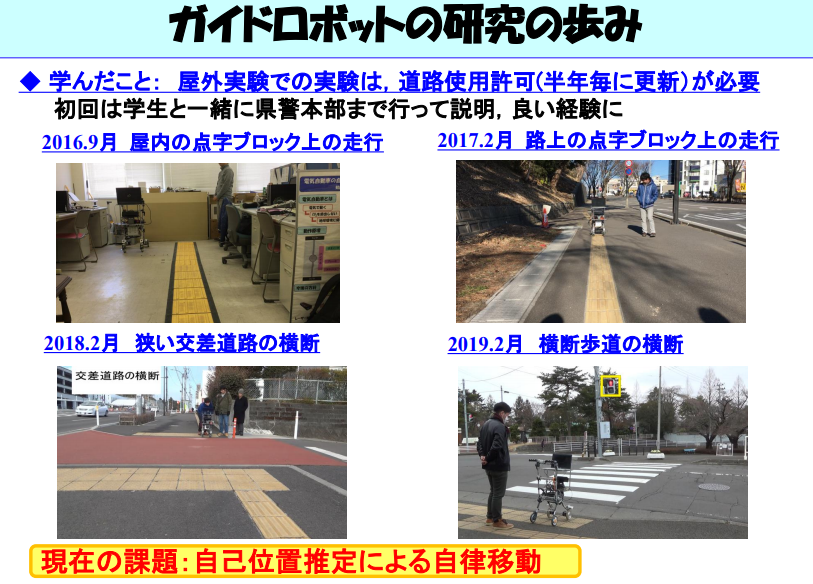 ≪ガイドロボットの研究の歩み≫
≪ガイドロボットの研究の歩み≫
現在、目の不自由な方の外出を困難にしている課題はいくつかあります。
それが、点字ブロックの管理不足や、誘導音の鳴らない横断歩道の存在です。
経年劣化により凹凸がすり減り、利用者が判別するのが難しい状態のまま放置されている点字ブロックや、誘導音を頼りに安全を判断できない横断歩道は、目の不自由な人の安全な外出を脅かします。
これらの存在が障害となり、外出する気力をなくしてしまう目の不自由な方はたくさんいらっしゃいます。
これらの課題を解決するために、現在、このガイドロボットに備わっている機能は2つあります。
一つ目は、点字ブロックに沿った移動のサポートです。
点字ブロックには、進行方向を示すラインブロックと、危険個所や誘導対象施設を示すポイントブロックがあります。
ガイドロボットは、このラインブロック上では進み、ポイントブロック上では停止します。
カメラで点字ブロックの両端のラインを検出して、その交点を目標点として誘導を行い、ポイントブロックを認識すると停止する仕組みになっています。
また誘導中は、直進時には両方のハンドルを、右左折時には内輪側のハンドルを振動させることで、使用者にロボットの移動方向を伝えます。
もう一つは、横断歩道を渡る際のサポートです。
赤信号では停止し、青信号に変わると誘導を再開します。
仕組みとしては、赤信号の停止のマークと青信号の進めのマークをそれぞれ搭載されたカメラで認識し、自動で停止および発進できるようにしています。
また横断に関しては、点字ブロックと同様、路面に書かれた横断歩道のラインの両端をカメラで検出し、その交点を目標点として移動する仕組みになっています。
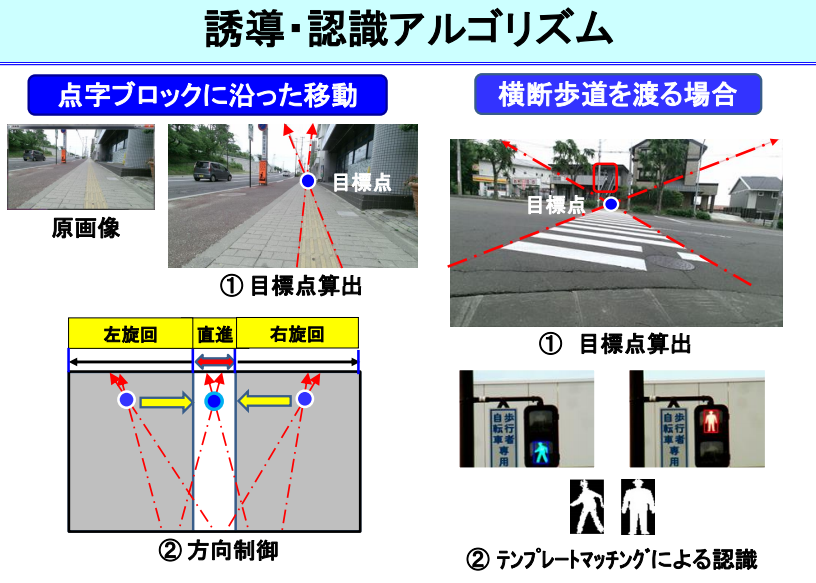 ≪信号を認識する仕組み≫
≪信号を認識する仕組み≫
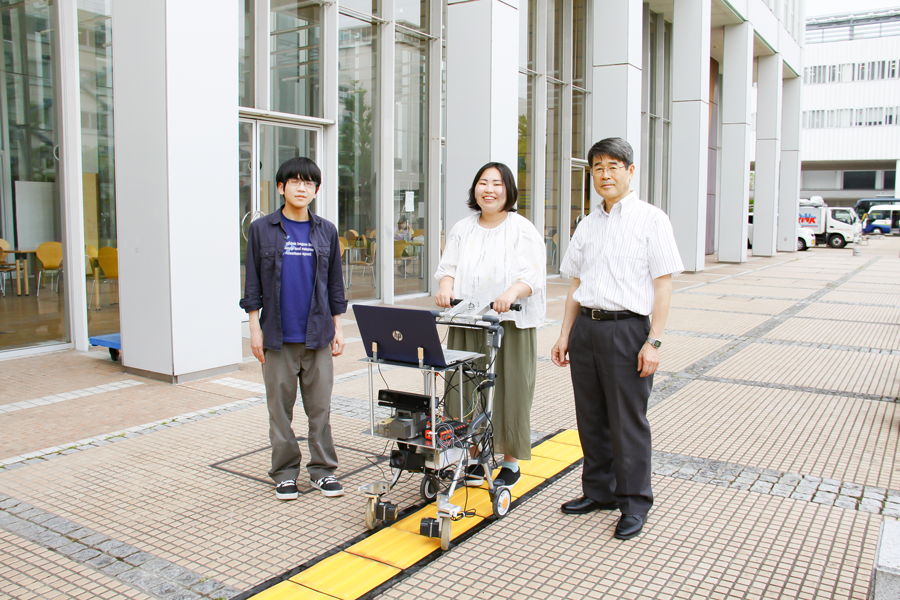
≪ラインブロック上では進み、ポイントブロックを見つけると停止するガイドロボット≫
以上のように、現在、点字ブロックに沿った移動のサポートと、横断歩道と歩行者信号の認識、横断のサポートをすることができます。
ガイドロボットを進化させていく上で、今後取り組みたいのは目的地までの誘導技術を開発することです。
ガイドロボットに地図データを搭載して、現在地を認識しながら使用者を目的地まで誘導できるようにしたいと考えています。
基本的には点字ブロックに沿って移動するガイドロボットですが、当然、点字ブロックが無い道を通らざるを得ない場合にも対応できなければいけません。
将来的には点字ブロックがなくてもガイドできる仕組みにしていこうと考えています。
また障害物や他の歩行者、段差などは、レーザ距離センサで検出できるため、今後は検出した危険を、安全に回避するシステムを作っていく予定です。」
丸山氏の研究するガイドロボットは、目の不自由な方が外出時に直面する様々な危険を回避する手段となる。
この研究が進むことで、目の不自由な方も気軽に外出することができるようになり、誰もが安心して暮らせる人にやさしい社会の実現に一歩近づくのではないだろうか。
小さな目標を立て、一つずつコツコツと
丸山氏から、ロボットの研究開発を志す人へメッセージをいただいた。
丸山氏「現代の社会では、こういうやり方は失敗するだとか、そのやり方はもうやられているだとか、あまりにも多くの情報が氾濫しています。
そのため、どうせ失敗するだろう、結果はもう分かっているのだからと、挑戦する前からあきらめてしまう人がたくさんいます。
しかし、教科書や論文を読んだだけでは本当のことはわからないと、私は考えています。
すでにやられていることも、本当かどうか疑い、実際に自分の手で再現してみることが必要です。
なぜなら、その過程で新たな発見や課題が見つかることが多くあるからです。
ですから、若い皆さんには、ぜひ失敗を恐れず何事にも挑戦してほしいと思います。
失敗してしまったら、次のアプローチを考えてまた挑戦する。
その繰り返しが成功への近道です。
そして、何かに着手したら、あきらめないで粘り強く続けてください。
何かでつまずいた時や、難しい問題を目の前にした時、すぐ投げ出してしまうのは非常にもったいないことです。
私も、このガイドロボットの研究をしようと思い立った当初は、その課題の多さに何から 手をつけていいのか分からず途方にくれました。
そこで、手始めに「高齢者用の電動スマートカート」の研究開発から始めることにしたのです。
 ≪高齢者用の電動スマートカート≫
≪高齢者用の電動スマートカート≫
電動スマートカートは、足腰の弱った高齢者の外出をアシストするカートです。
力センサと傾斜センサが搭載されており、押すまで動き出さず、両手を離すと自動停止します。
さらに、下り坂でのスピード抑制機能、段差の乗り越えを補助する機能などを実装しています。
この電動スマートカートの研究開発を、最初の目標に設定し乗り越えたことで、ここで得た知識と経験を生かし、ガイドロボットの研究にもスムーズに着手することができました。
また、ガイドロボットの他に、バイオリン演奏ロボットの研究も行っています。
研究を始めた当初の目標は、「きらきら星」をロボットに弾かせることでした。
既存の研究用アームロボットを購入して1号機を開発するのに1年半、弓を弾く速さと強さをそれぞれ制御できる機構を持つ2号機を開発するのに1年半かかりました。
その後も、音量制御を研究し、移弦のできる3号機の開発を経て、最終的に「きらきら星」を弾けるようになるまで丸4年かかりました。目標を達成したときは、本当にうれしかったです。
その後も、さらに高度な演奏法であるビブラートに挑戦し、現在は良い音を奏でるための弓の弾き方を研究しています。
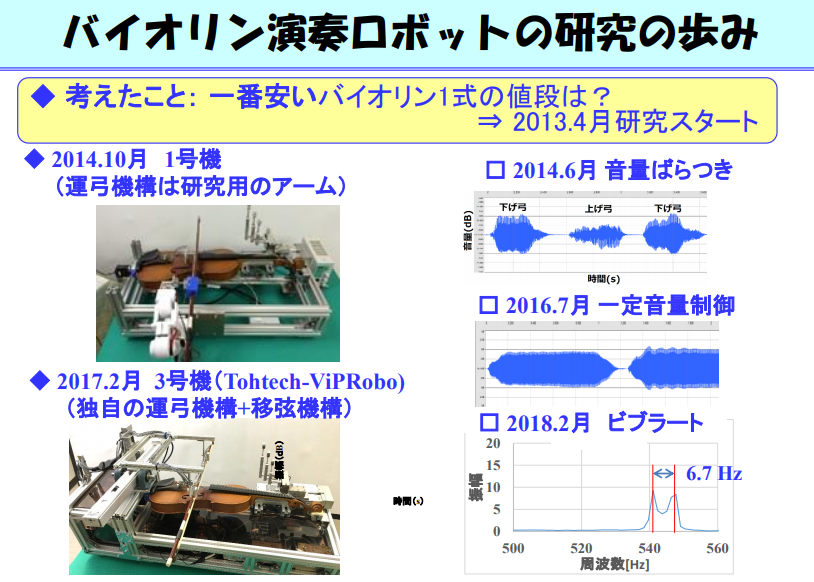
≪バイオリン演奏ロボットの研究の歩み≫
ローマは一日にして成らず、です。
最初は難しく見える大きな問題も、小さなことから段階を踏んで、一つ一つ目標を設定してみてください。
それに向かってあきらめず試行錯誤することで、より大きな問題の解決につながる道が開けてきます。
最後に、“人生は修行だ、高みを目指して、己を磨け、日々進化せよ”」
補記:
丸山氏「今、新型コロナウイルスが世界中で猛威を振るっています。
過去にも感染症の脅威が何度かありましたが、先人たちは、叡智を絞ってそれを克服してきました。
温故知新。ロボット開発においても、まずは先人たちの実用化までの苦難の歴史を学び、その上に新しいロボットの価値を創造しましょう。」(2020/04/15)
丸山研究室:http://www.eis.tohtech.ac.jp/study/labs/maruyama/index.html
2017年12月動画(研究室紹介動画):https://www.youtube.com/watch?v=wyRyiUIlC9Q
2021年12月23日追記:
※令和3年令和2年3月末をもってご退職され、名誉教授となりました。