

プロフィール
 宇都宮大学 工学部 教授 尾崎 功一
宇都宮大学 工学部 教授 尾崎 功一
経歴
2011年度~現在 宇都宮大学工学部教授
2018年度~現在 宇都宮大学ロボティクス工農技術研究所所長
2019年度~現在 宇都宮大学発ベンチャー アイ・イート株式会社代表取締役社長
2005年度~2010年度 宇都宮大学准教授(助教授)
1997年度~2004年度 宇都宮大学専任講師
1996年度 宇都宮大学着任 助手
今までになかった自律移動ロボットのナビゲーション方法
今回紹介するのは、人間には感知できないあるものを使って自律移動ロボットをナビゲートする研究者、尾崎氏である。
尾崎氏「私は、人間の生活圏で活動できる自律移動ロボットを研究開発しています。
多くの自律移動ロボットは、建物や電柱、樹木など、その空間にあるものを目印に走る、ランドマーク法を採用しています。
この方法では、空間情報を記録した地図と、周りの環境を認識するセンサーをロボットに搭載します。
移動する際には、センサーで周囲の建物や電柱などを検知し、それらの情報を地図と照らし合わせることで、自己位置を認識して動いているのです。
しかし、街中で自律移動ロボットを活用することを考えると、この方法には問題点があります。
例えば、道端に人間が立っていたとして、その人間は、ロボットの持っている地図情報にはないものです。
すると、センサーで検知した情報と、持っている地図の情報が合致しないために、ロボットは現在地が分からなくなってしまうのです。
この問題を解決するために、磁気ノイズを目印に自律移動ロボットを走らせる、磁気ナビゲーション法を考案しました。
私たちの身の回りには、建物に使われている鉄骨や、マンホール、街灯など、磁性を帯びた構造物が数多く存在します。
その影響で、それらの構造物の近くは磁気ノイズが発生し、磁場が乱れています。
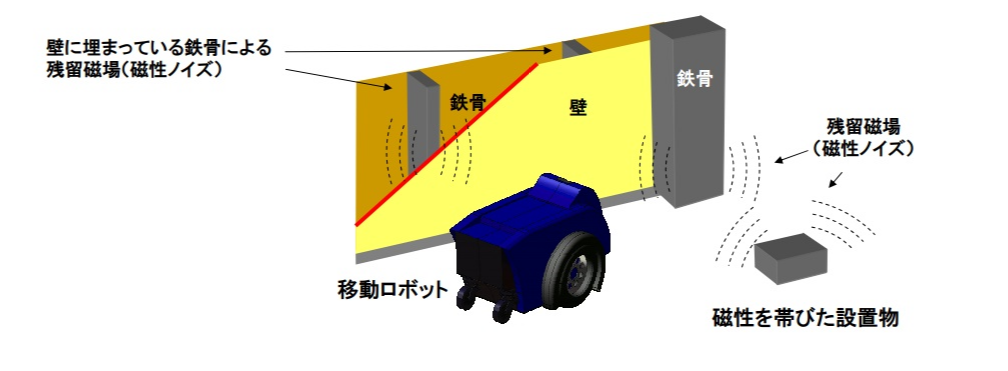
この磁気ノイズは常に同じ場所から発生し、また人混みの影響を受けないことから、従来のランドマーク法よりも確実に、自律移動ロボットをナビゲートすることができます。
具体的には、以下のようなシステムで、磁気ノイズを自律移動ロボットの目印として利用しています。

≪磁気ナビゲーション法による自己位置認識の方法≫
① 磁気センサーを使い、ロボットの移動経路上に発生している磁気ノイズの強さと座標を計測する
② 計測した情報を地図に落とし込み、磁気マップを作成
③ 磁気マップをロボットに搭載する
④ ロボットは磁気センサーで周囲の磁気ノイズを計測し、それを磁気マップの情報と重ね合わせることで自己位置の認識ができるようになる
私が現在開発中の自律移動ロボットには、磁気ナビゲーション法と従来のランドマーク法の技術を両方盛り込んでいます。
磁気ナビゲーション法は、人込みの中でも安定して使えるという利点がありますが、磁気の乱れがない、広大な広場のような場所では使えません。
逆に、ランドマーク法は、木の1本でもあればそれを目印にできますが、人混みなど環境の変化が激しいところでは使えません。
このように、それぞれの方法には対応できる場所とできない場所があります。
両方の技術を搭載することで、磁気ナビゲーション法ではカバーしきれない場所を、ランドマーク法で補うことができるのです。
この方法で、実際に街中を走行する実験でも好成績を収めており、大学が製作したロボットとして初めて公道を走行するために必要なナンバー登録(つくば市)を2013年11月に獲得しました。
2020年8月現在でも公的なナンバー登録を果たしたロボットは宇都宮大学のロボットだけと聞いています。
また、2018年8月には、日本で初めて公道で行われたロボットパレード「まつりつくば」に参加することができました。」

≪尾崎氏の開発した移動ロボット≫
ユーザーのニーズに合わせて様々ことに使用できるロボットへ
磁気の乱れを目印とする新たなシステムを搭載した尾崎氏の自律移動ロボット。
これからの目標と今後の課題について伺った。
尾崎氏「将来的には、この自律移動ロボットを、街中でのごみ拾いや搬送作業、農業の手伝いなど、ユーザーそれぞれのニーズに合わせて、いろいろなことに使ってほしいです。
“〇〇をするためのロボット”と、こちらが用途を決めてしまうのではなく、使い道はユーザーの手に委ねることで、このロボットの可能性が広がるのではなかと考えています。
このロボットを広く一般の方にも使ってもらうために、今後のやらなくてはいけないのは、この技術を誰でも使えるような形にすることです。
現在、このロボットを自律走行させるためには、磁気マップを作成・搭載してプログラムを調整するという作業を行う必要があります。
しかし、この作業は、ある程度の知識を持った人でないと行うことができません。
この作業をできるだけ簡単にして、一般の人でも気軽に使える自律移動ロボットにするというのが一つの目標です。

≪製品化を目指しているロボット≫
また、つくば市では「ロボット特区実証実験推進協会」によってパーソナルモビリティロボット(1人乗りのコンパクトな移動支援ロボット)の普及活動が行われています。
現在の日本では、国の規制により、パーソナルモビリティロボットは街中を走ることはできません。
この規制を解除するため、協議会では、パーソナルモビリティロボットの走行テストを行い、安全に走行できた実績を積み上げる活動を行っています。
宇都宮大学もこの協議会の会員となり、毎年、つくば市においてナンバー登録を果たした自律移動ロボットで10キロ程度の試験走行を行い、この活動に協力しています。
安全に使用できるという実績を積み重ね、規制が解除された暁には、幅広い場面で自律移動ロボットを活躍させたいです。」
逆転の発想で新たなアイディアを生み出す
誰もやっていなかった方法で、自律移動ロボットの性能を進化させてきた尾崎氏。
自律移動ロボットの目印に地磁気の乱れを使おうと考えたきっかけは何だったのか、お話を伺った。
尾崎氏「私が宇都宮大学に赴任してきた当時、共同研究をしていた会社が製造ライン等で使われているAGV(無人搬送車)を作っている会社でした。

≪無人搬送車≫※画像はイメージです
出典:wikipedia
AGVは、目印にしている磁気テープから頻繁に脱線してしまうという問題を抱えていました。
この脱線の原因が、磁気ノイズなんです。
磁気ノイズがあると、AGVは磁気信号を読み間違い、軌道をはずれてしまうのです。
それを防ぐために、磁気テープを張る際は、室内の磁気を測定し、AGVに影響しそうな磁気ノイズがないかを確かめ、テープを張っていく。
そんな面倒なことするなら、室内の磁気の様子を地図にして、全てロボットに覚えさせたらいいのではないか、と考えたのが始まりです。」
自律移動ロボットが走行するには邪魔になる環境中の磁気の乱れを、逆転の発想でロボットが走るための目印にした尾崎氏。
研究に行き詰ったときには、「考え方を逆転させる」ことを心がけているという。
常識的に考えればこうだ、という枠を作らない柔軟な思考が、新たな技術を生み出す秘訣なのかもしれない。
まずはつくってみることが大事
ロボットの研究開発を志す人へ、尾崎氏からメッセージをいただいた。
尾崎氏「 “ロボットを実際につくってみること”を大事にしましょう。
シミュレーションと違い、実際につくってみて得られた結果は、絶対に真実です。
実際につくってみて、その後に理論を研究したって別にいいんです。
昔は、ロボットをつくるための道具がなかったり、お金が足りなかったりしたので、理論をしっかり積み上げて、無駄なモノづくりをしないようにしようという風潮がありました。
ところが今は、材料も良いものが出て、コンピューターも3Dプリンターもどんどん安くなっています。
だから、どんどんつくって、どんどん実験して、どんどん動かしてみましょう。
そうすると、大体想像通りには動いてくれません。
その結果を基に、理論的な積み上げをしたっていいわけです。
先に理論ばかりを考えてしまうと、やる前からリスクを考えてしまって、アクションを起こせなくなってしまいます。
理論ばかりを積み上げるより、まずは楽しんでロボットをつくってみてください。
そこからたくさんの発見が得られるはずです。」
